THÔNG BÁO: OhStem sẽ nghỉ Lễ từ thứ Bảy, 29/4 đến hết thứ Tư, 3/5 👉 Các đơn hàng được đặt trong thời gian này sẽ được giao dần từ ngày 4/5.
Bài học 8: Cảm biến gia tốc góc nghiêng
Ở bài này, chúng ta hãy cùng lập trình cho 2 đèn LED RGB trên board bật tắt theo độ nghiêng của xController.
Thiết bị cần sử dụng
- Board điều khiển xController
- Cảm biến gia tốc MPU6050 được tích hợp trên xController
Giới thiệu về cảm biến gia tốc
Đây là bộ phận dùng để đo góc nghiêng của xController và cho ta biết xController đang nghiêng về hướng nào. Cảm biến gia tốc MPU6050 trên xController đo được 3 chiều trong không gian:
- x (nghiêng về sau hay trước)
- y (nghiêng sang trái hay phải)
- z (xController đang úp hay ngửa)
Viết chương trình
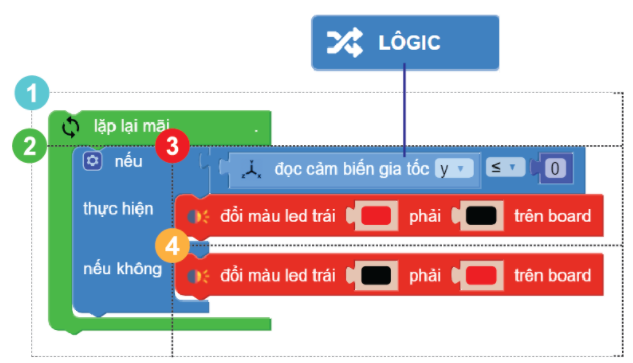
1. Dùng chế độ lặp lại mãi cho chương trình
2. Sử dụng câu lệnh điều kiện để đưa ra hành động cho từng trường hợp
3. Nếu xController nghiêng sang trái (giá trị trục y < 0) thì bật đèn LED trái
4. Nếu không (xController nghiêng sang phải) thì bật đèn LED phải
Khi chương trình chạy, giá trị của các trục của 2 cảm biến sẽ được hiển thị lên cửa sổ thông tin.