How Can We Help?
BatmanBot
Đây là bài viết hướng dẫn sử dụng robot lắp ráp BatmanBot – Một robot STEM giúp học sinh tiếp cận với học lập trình một cách thú vị.
Giới thiệu
BatmanBot là xe Robot lắp ráp giúp các bạn nhỏ có thể làm quen với công nghệ Robot một cách thú vị. Đây là công cụ hỗ trợ dạy và học STEM hiệu quả. Dựa vào các hướng dẫn chi tiết, các em có thể tự mình xây dựng được mô hình Robot hoàn chỉnh cho riêng mình rất dễ dàng.
BatmanBot có thể được điều khiển qua điện thoại, máy tính bảng hoặc máy tính bằng công nghệ Bluetooth. Với sản phẩm này, các em có thể hiểu được cách hoạt động của các loại động cơ, cảm biến điện tử và khái niệm lập trình khối lệnh, từ đó phát triển tư duy logic và tư duy sáng tạo.
Hướng dẫn lắp ráp
Các bạn tham khảo video hướng dẫn bên dưới để lắp ráp hoàn chỉnh mô hình Robot.
Chú ý: Mica là vật liệu giòn và dễ gãy nên bạn cần cẩn thận khi lắp ráp và xiết ốc, tránh dùng lực quá mạnh dẫn đến gãy các miếng lắp ráp.
Cách lắp ráp BatmanBot Ver.1
BatmanBot Version 1 là phiên bản sử dụng 2 hộp pin liền nhau không có switch gạt như hình:

Bạn có thể tham khảo cách lắp ráp tại đây:
Cách lắp ráp BatmanBot Ver.2
BatmanBot Ver.2 là phiên bản sử dụng hộp 2 pin như hình:
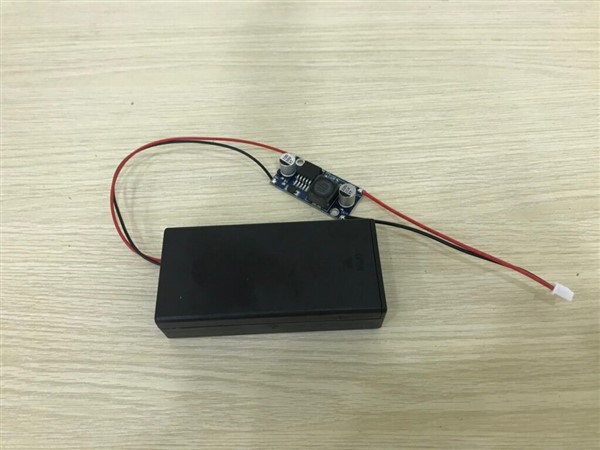
Bạn có thể tham khảo cách lắp ráp xe BatmanBot qua video dưới đây:
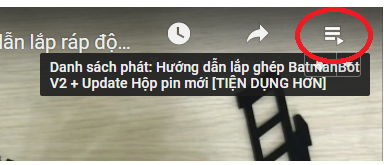
Lưu ý: Các bạn có thể nhấn vào biểu tượng danh sách phát (vùng được khoanh đỏ như hình dưới) để chọn xem các video hướng dẫn khác.
Cài đặt phần mềm OhStem App
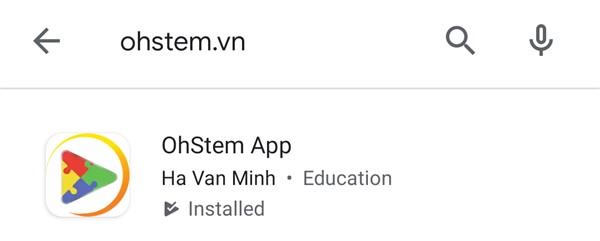
Để làm việc với Robot, bạn vào Play Store (nếu dùng Android) hoặc App Store (nếu dùng iOS) để tìm và cài đặt OhStore App (bạn tìm app theo tên là ohstem.vn).
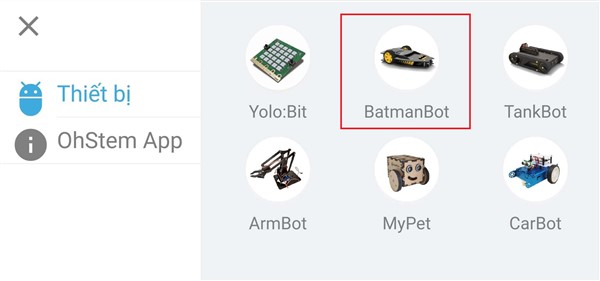
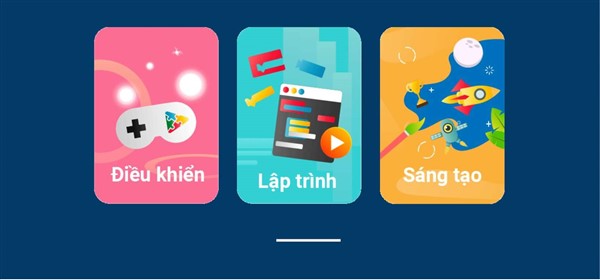
Sau khi cài đặt, bạn mở app lên và chọn đúng loại Robot.
Phần mềm hỗ trợ 3 chức năng chính là Điều khiển, Lập trình và Sáng tạo (Bạn có thể tự thiết kế giao diện điều khiển trong mục Sáng tạo này)
hướng dẫn sử dụng robot lắp ráp BatmanBot
Để điều khiển và ra lệnh các chức năng, bạn vào mục Điều khiển. Ở đây bạn sẽ thấy giao diện điều khiển của chương trình, bao gồm:
- 1 cần điều khiển joystick quay được 360 độ để di chuyển
- Các nút kích hoạt các chế độ hoạt động nâng cao mặc định.

Các chế độ hoạt động nâng cao bao gồm:
- Tăng tốc: Robot chạy thẳng về phía trước với tốc độ tối đa trong vòng 3 giây
- Né vật cản: Robot sẽ chạy thẳng, nếu gặp vật cản thì sẽ quẹo trái để né vật cản
- Trốn vật cản: Robot sẽ đứng yên, nếu đột nhiên phát hiện vật cản trước mặt (ta thử đưa tay che lại trước mặt Robot) thì Robot sẽ lùi lại và quay đầu chạy ra xa
- Dò line: Robot sẽ chạy theo đường kẻ màu đen vạch sẵn. Bạn có thể bật chế độ này với bản đồ đi kèm sản phẩm hoặc tự vẽ một bản đồ theo ý mình.
- Bắn: Robot sẽ tiến hành bắn các mục tiêu đằng trước xe thông qua vũ khí chiến đấu đã được tích hợp trên thân xe. Lưu ý rằng bạn cần phải gắn đạn (xem video hướng dẫn) vào xe trước khi thực hiện tính năng này.
Để kết nối đến Robot, bạn nhấn vào biểu tượng Bluetooth ở góc phải và để điện thoại lại gần Robot, app sẽ quét tìm Robot ở gần và tự kết nối.


Sau khi kết nối thành công, app sẽ quay lại màn hình điều khiển và biểu tượng Bluetooth sẽ chuyển thành màu xanh.

Nếu app không tìm thấy Robot để kết nối thì sẽ báo lỗi.
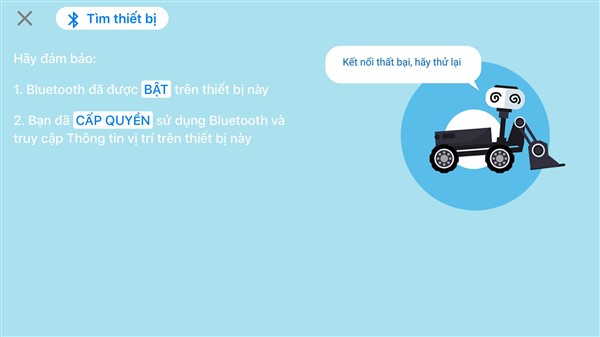
Khi đó bạn cần kiểm tra các thứ sau:
+ Robot đã bật nguồn và đèn led giữ ở màu đỏ (Robot khởi động thành công và chờ kết nối)
+ Điện thoại đã bật Bluetooth và phân quyền cho app dùng Bluetooth. Riêng đối với Android thì cần cho phép app dùng Location service.
Chế độ lập trình
Ngoài việc hỗ trợ điều khiển và bật các chế độ hoạt động sẵn có, phần mềm còn hỗ trợ người dùng tự lập trình chương trình để Robot hoạt động theo ý muốn. Để lập trình cho Robot, bạn vào menu Lập trình.
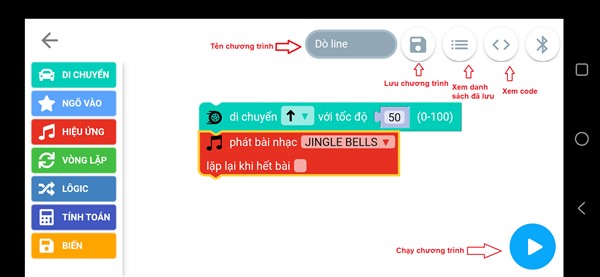
Để lập trình, các bạn có thể kéo các khối lệnh từ các mục bên tay trái vào không gian giữa màn hình và nối các khối lệnh với nhau.
Nếu Robot đang được kết nối thì bạn có thể chạy chương trình bằng nút ở góc dưới bên phải của màn hình.
Ngoài ra, bạn có thể lưu chương trình hoặc xem lại các chương trình đã lưu.
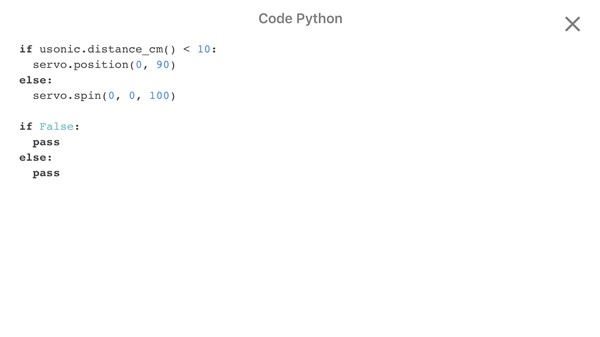
Bạn có thể xem được code tạo ra từ các khối (ngôn ngữ Python).
Hướng dẫn chi tiết cách lập trình các khối sẽ được OhStem bổ sung sớm trong thời gian sắp tới.
Tự tạo giao diện điều khiển
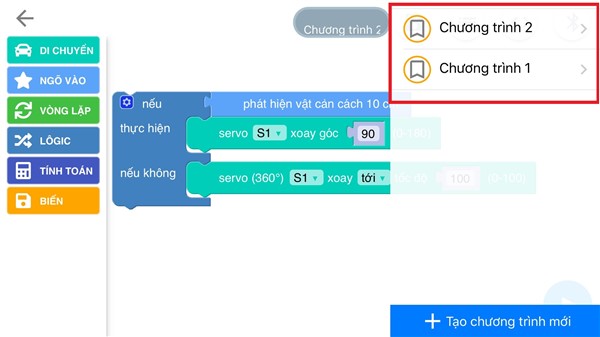
Ngoài giao diện điều khiển mặc định, phần mềm cho phép người dùng tự tạo giao diện điều khiển cho riêng mình trong mục Sáng tạo. Người dùng có thể kết hợp với các chương trình, mã lệnh mình viết với giao diện điều khiển mình tạo ra.

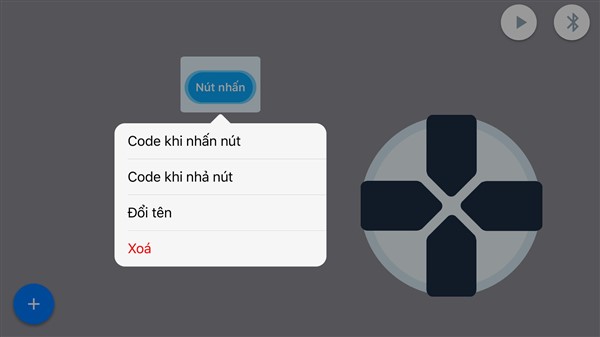
Bạn nhấn vào biểu tượng dấu + như hình dưới để tạo mới một giao diện điều khiển mới.

Bạn có thể kéo các control như joystick 360 độ, phím điều hướng, nút nhấn, thanh trượt… vào giao diện.
Trừ joystick hay phím điều hướng là bạn không thể sửa code, các control còn lại bạn có thể sửa code tương ứng với các sự kiện của control. Ví dụ nút nhấn thì có sự kiện là nhấn và nhả ra. Bạn có thể lập trình cho robot di chuyển khi nhấn nút và dừng lại khi thả ra.
Giao diện lập trình sẽ tương tự như giao diện lập trình đã giới thiệu ở trên.
Các vấn đề thường gặp và cách sửa lỗi
Hướng dẫn cài đạn thun và sửa lỗi nòng súng
Hướng dẫn điều chỉnh cảm biến dò line (dò đường)
Phụ lục
Bước 1: Lắp thân xe
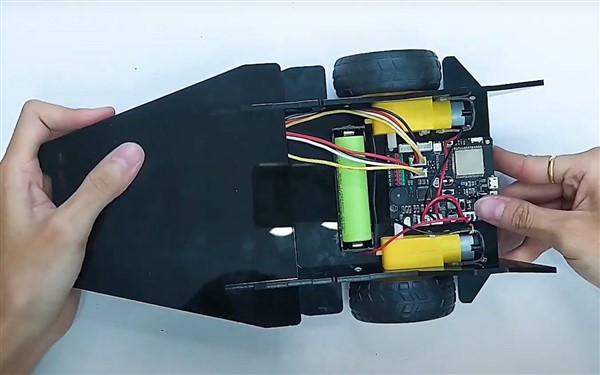
Thân xe BatmanBot bao gồm: Mạch điều khiển, đế xe, 2 động cơ, 2 bánh xe, 1 bánh đa hướng, khung bánh xe, cảm biến dò đường, đế pin (có kèm theo pin). Tiến hành lắp ráp như sau:
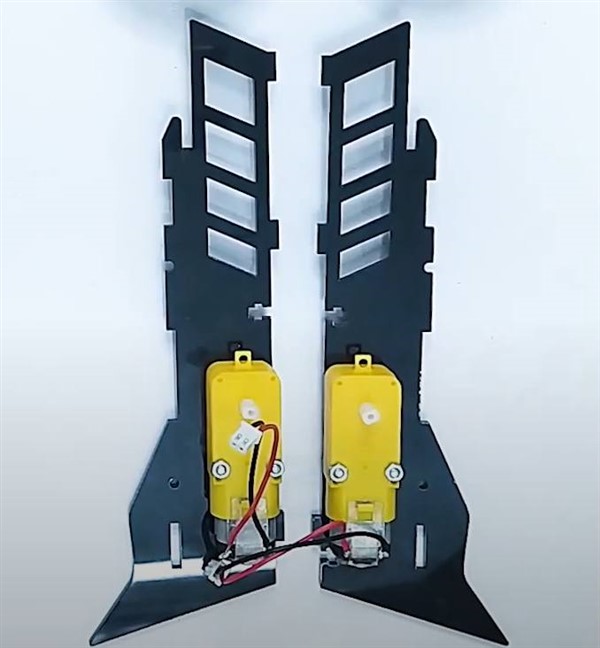
1. Gắn động cơ vào khung bánh xe
Dùng 2 bulong M3 25mm để cố định động cơ vào khung như hình dưới.
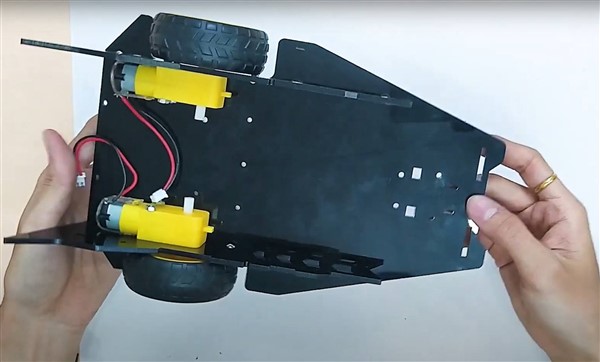
2. Gắn 2 mảnh động cơ trên vào đế xe và dùng bulong M3 10mm, đai ốc M3 để cố định. Lắp đai ốc M3 vào khe bắt ốc trên 2 mảnh động cơ, sau đó gắn bulong vào đế xe và siết lại. Tiếp tục lắp bánh xe vào.
3. Lắp bánh đa hướng
Lắp mảnh đệm và bánh xe đa hướng như hình vào nhau rồi gắn dưới đầu xe như hình. Dùng 2 bulong M3 10mm và ốc để cố định lại.
4. Lắp cảm biến dò đường
Lắp cảm biến dò đường trên đế xe như hình minh hoạ. Dùng 2 bulong M3 10mm và ốc để cố định.

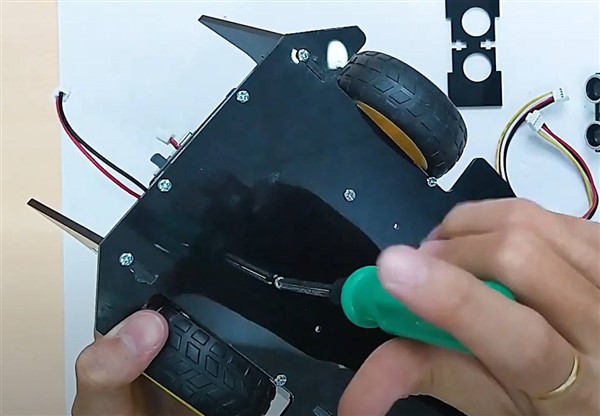
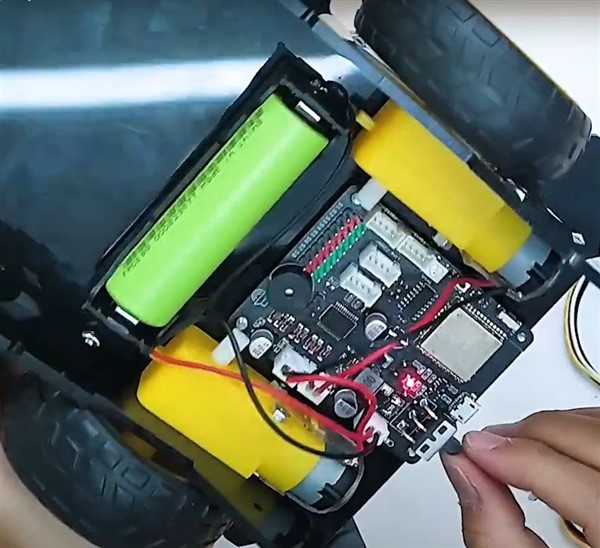
5. gắn mạch điều khiển
Gắn 4 bulong M3 10mm từ phía dưới đế xe lên như hình minh họa. Dùng đai ốc M3 siết lỏng.
Gắn mạch điều khiển lên vị trí vừa lắp ốc. Lưu ý: Công tắc mạch sẽ nằm ở phía đuôi xe. Lúc này, bạn tiếp tục dùng 4 đai ốc M3 gắn lên và siết chặt ốc lại.
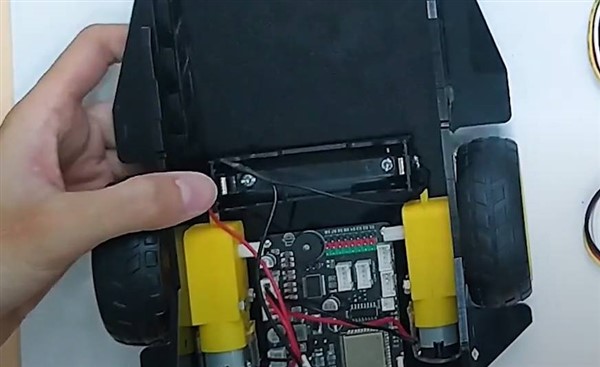
6. Gắn hộp pin lên đế xe như hình (Cạnh mạch điều khiển). Sau đó dùng 2 bulong siết chặt lại.
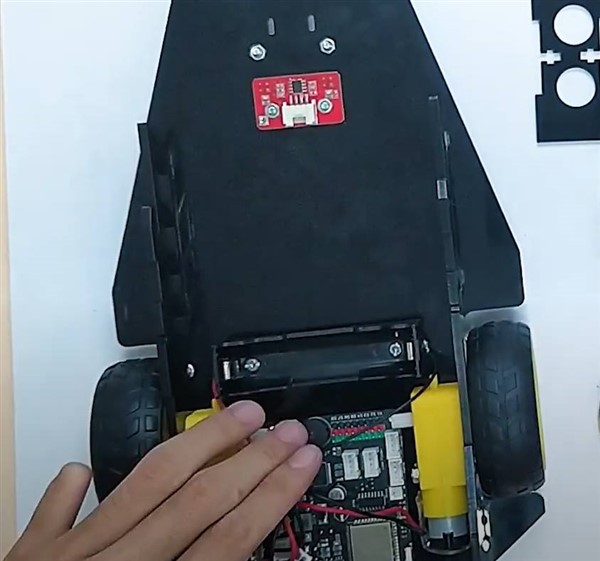
7. Sau đó, cắm jack pin vào chân cắm pin trên mạch điều khiển. Lưu ý: Chiều dương sẽ nằm ở bên trái.
8. Lắp pin vào đế pin. Lưu ý: đầu pin có dấu lõm là đầu dương. Bạn nên chú ý lắp đúng theo chiều âm dương. Sau khi lắp xong, nếu bạn bật công tắc và đèn của mạch điều khiển sáng là đã thành công
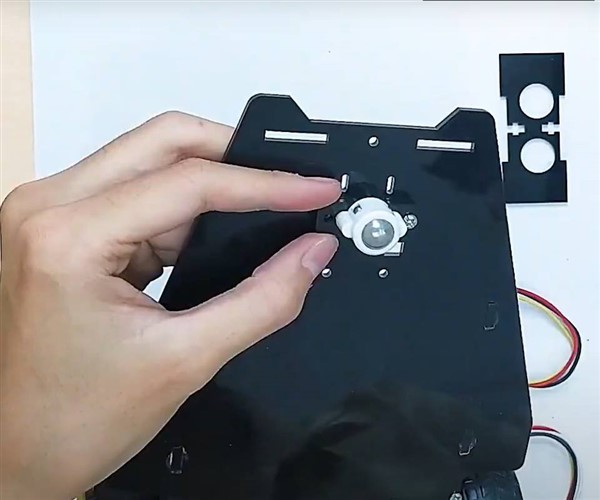
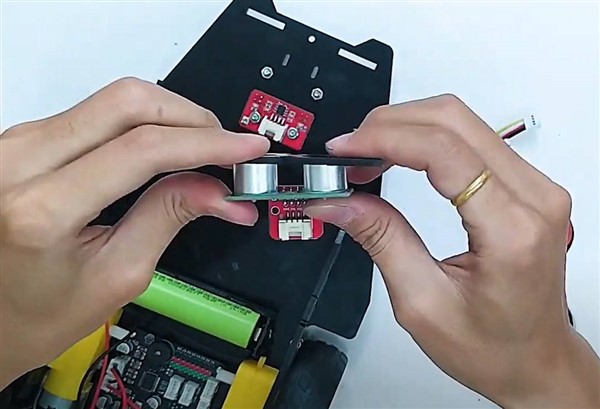
Bước 2: Lắp cảm biến siêu âm
Bạn cần chuẩn bị cảm biến siêu âm và giá đỡ tương ứng. Tiến hành thực hiện lắp ráp theo các bước như sau:
1. Lắp cảm biến siêu âm và miếng giá đỡ tương ứng vào nhau. Lưu ý rằng đế của cảm biến siêu âm sẽ nằm cùng hướng với khe bắt ốc trên giá đỡ.
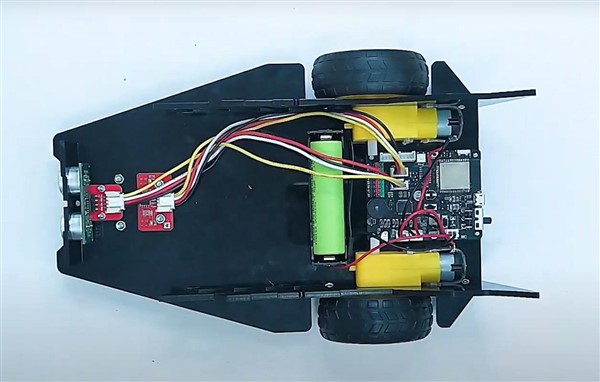
2. Lắp bộ phận trên vào đầu xe, sử dụng bulong M3 để cố định lại.

3. Dùng cáp grove để kết nối cảm biến siêu âm với cổng Ultrasonic trên mạch điều khiển như hình
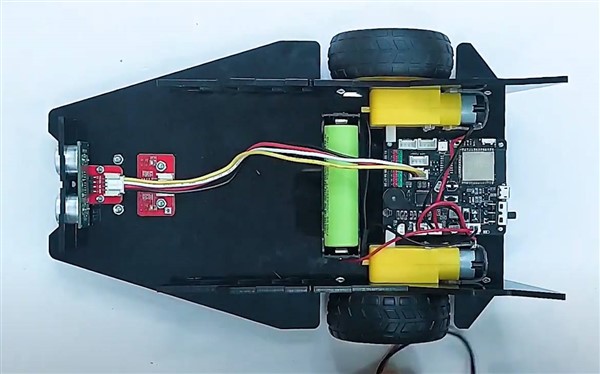
4. Dùng cáp grove để kết nối cảm biến dò đường với cổng Line Finder trên mạch điều khiển như hình
Bước 3: Hoàn thiện thân xe
Ở bước này, các bạn chỉ cần tiến hành lắp nóc xe vào trên thân xe là xong. Tiến hành đặt nóc xe lên trên thân xe theo các khớp có sẵn như hình minh hoạ dưới. Chú ý, vì Mica là vật liệu dễ vỡ nên bạn hãy nhẹ tay khi lắp ráp nhé.
Bước 4: Lắp ráp súng
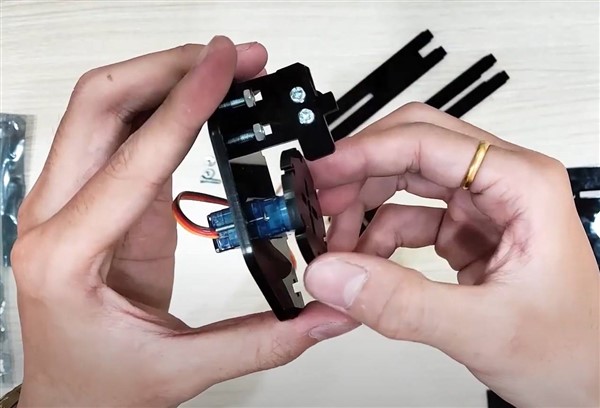
Súng của BatmanBot gồm có: Đế súng, 2 giá đỡ nòng súng, 2 đĩa cài đạn, 2 mảnh trục nòng súng, Servo và cần gạt đạn. Tiến hành thực hiện lắp như sau:
1. Lắp động cơ Servo vào giá đỡ nòng súng 1
Lắp động cơ Servo vào giá đỡ Servo như hình và dùng 2 bulong M2 10mm để cố định 2 bên Servo.

2. Lắp cần gạt đạn
Đặt 2 mảnh như hình xếp chồng lên nhau và dùng bulong M3 10mm để cố định. Tiếp tục sử dụng đai ốc M3 để siết chặt như hình.

Dùng bulong M3 10mm lắp vào bên cạnh, sau đó gắn lò xo và đai nhựa vào dọc theo bulong. Dùng 2 đai ốc M3 siết lại.

3. Lắp cần gạt đạn vào giá đỡ Servo
Lắp bộ phận ở phần trên vào giá đỡ Servo theo khớp có sẵn và dùng 2 bulong M3 10mm để cố định lại.

Lắp đĩa cài đạn 1 vào trục servo
4. Lắp giá đỡ Servo vào đế súng theo khớp có sẵn và cố định bằng 2 bulong M3 10mm

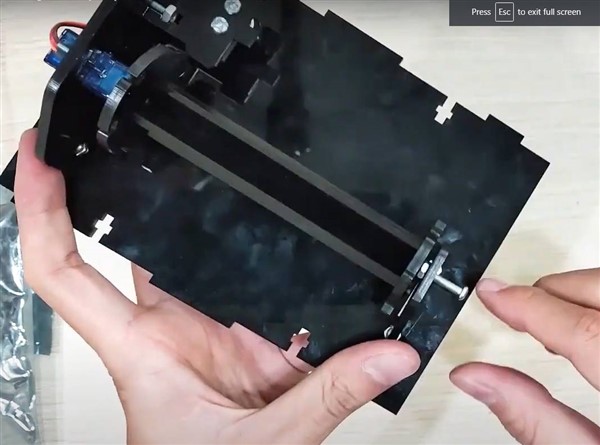
5. Lắp nòng súng
Gắn giá đỡ servo 2 vào đế súng như hình minh họa. Cố định bằng 2 bulong 3M 10mm.

Tiếp tục lắp bulong M3 10mm và đai ốc M3 vào lỗ duy nhất trên mảnh. Đây là vị trí dùng để lắp nòng súng ở các bước tiếp theo.

6. Hoàn thiện súng
Lắp 2 trục nòng súng với nhau như hình minh họa

Lắp đĩa cài đạn 2 vào trục nòng súng mới lắp

Lắp khối này vào giữa giá đỡ Servo và mảnh đã lắp ở mục trên. Dùng dụng cụ siết bulong M3 10mm trên mảnh ở phần 5 lại là xong.
Bước 5: Hoàn thiện mô hình xe BatmanBot
Lúc này, bạn chỉ cần tiến hành lắp súng và bánh xe vào thân xe Batman
1. Lắp súng lên thân xe, dùng 4 bulong M3 10mm và ốc gắn vào khe bắt ốc để cố định 2 bộ phận này lại với nhau.
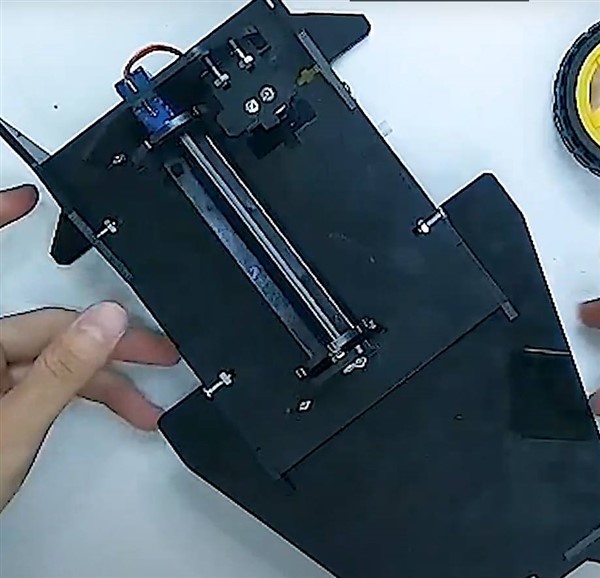
2. Lắp bánh xe
Sử dụng 2 bánh xe và lắp vào trục động cơ mỗi bên xe.
Xong! Vậy là bạn đã hoàn thành mô hình xe BatmanBot rồi đấy.


