How Can We Help?
SpiderBot
SpiderBot là Robot lắp ráp thông minh có thiết kế mô phỏng nhện 4 chân, được tích hợp nhiều tính năng thú vị như hít đất, nhảy dancing, vẫy tay chào,… Với SpiderBot, bạn có thể tìm hiểu và làm quen với lập trình một cách dễ dàng. Hãy cùng OhStem xem hướng dẫn lắp ráp robot nhện thông minh này.
Hướng dẫn lắp ráp robot nhện SpiderBot
Các bạn tham khảo video hướng dẫn bên dưới để lắp ráp hoàn chỉnh mô hình Robot.
Chú ý: Mica là vật liệu giòn và dễ gãy nên bạn cần cẩn thận khi lắp ráp và xiết ốc, tránh dùng lực quá mạnh dẫn đến gãy các miếng lắp ráp.
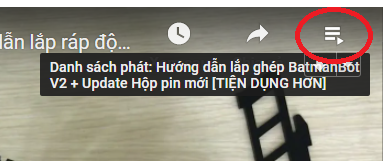
Lưu ý: Các bạn có thể nhấn vào biểu tượng danh sách phát (vùng được khoanh đỏ như hình dưới) để chọn xem các video hướng dẫn lắp ráp robot nhện khác.
Cài đặt phần mềm OhStem App
Để làm việc với Robot, bạn vào Play Store (nếu dùng Android) hoặc App Store (nếu dùng iOS) để tìm và cài đặt OhStore App (bạn tìm app theo tên là ohstem.vn).
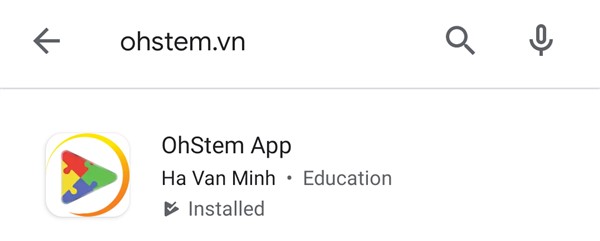
Sau khi cài đặt, bạn mở app lên và chọn đúng loại Robot.
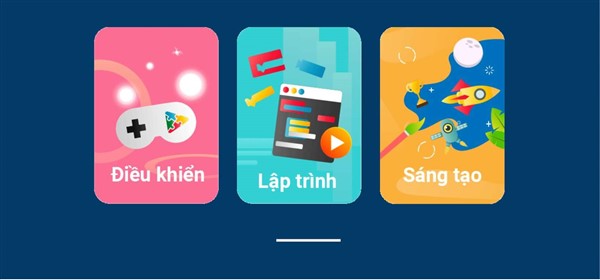
Phần mềm hỗ trợ 3 chức năng chính là Điều khiển, Lập trình và Sáng tạo (Bạn có thể tự thiết kế giao diện điều khiển trong mục Sáng tạo này)
Điều khiển robot
Để điều khiển và ra lệnh các chức năng, bạn vào mục Điều khiển. Ở đây bạn sẽ thấy giao diện điều khiển của chương trình, bao gồm:
- 1 cần điều khiển joystick quay được 360 độ để di chuyển
- Các nút kích hoạt các chế độ hoạt động nâng cao mặc định.
Để kết nối đến Robot, bạn nhấn vào biểu tượng Bluetooth ở góc phải và để điện thoại lại gần Robot, app sẽ quét tìm Robot ở gần và tự kết nối.

Sau khi kết nối thành công, app sẽ quay lại màn hình điều khiển và biểu tượng Bluetooth sẽ chuyển thành màu xanh.
Nếu app không tìm thấy Robot để kết nối thì sẽ báo lỗi.
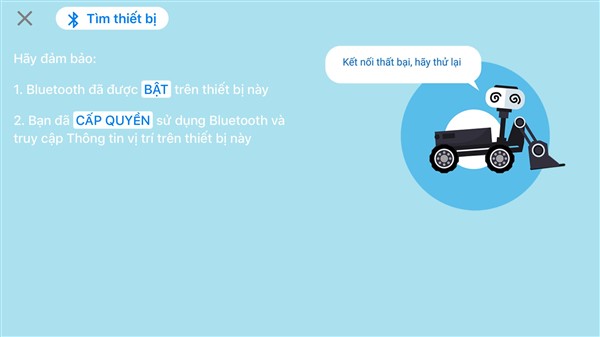
Khi đó bạn cần kiểm tra các thứ sau:
+ Robot đã bật nguồn và đèn led giữ ở màu đỏ (Robot khởi động thành công và chờ kết nối)
+ Điện thoại đã bật Bluetooth và phân quyền cho app dùng Bluetooth. Riêng đối với Android thì cần cho phép app dùng Location service.
Chế độ lập trình
Ngoài việc hỗ trợ điều khiển và bật các chế độ hoạt động sẵn có, phần mềm còn hỗ trợ người dùng tự lập trình chương trình để Robot hoạt động theo ý muốn. Để lập trình cho Robot, bạn vào menu Lập trình.
Để lập trình, các bạn có thể kéo các khối lệnh từ các mục bên tay trái vào không gian giữa màn hình và nối các khối lệnh với nhau.
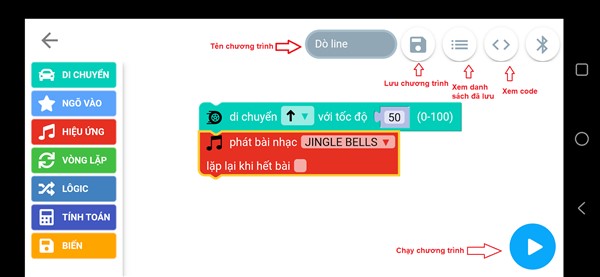
Nếu Robot đang được kết nối thì bạn có thể chạy chương trình bằng nút ở góc dưới bên phải của màn hình.
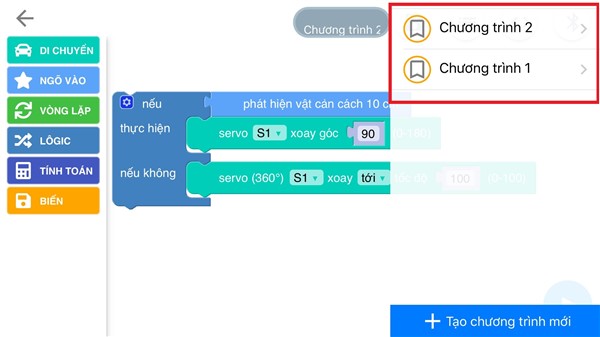
Ngoài ra, bạn có thể lưu chương trình hoặc xem lại các chương trình đã lưu.
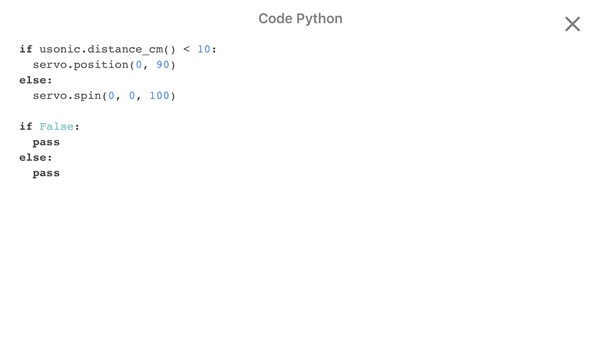
Bạn có thể xem được code tạo ra từ các khối (ngôn ngữ Python).
Hướng dẫn chi tiết cách lập trình các khối sẽ được OhStem bổ sung sớm trong thời gian sắp tới.
Tự tạo giao diện điều khiển
Ngoài giao diện điều khiển mặc định, phần mềm cho phép người dùng tự tạo giao diện điều khiển cho riêng mình trong mục Sáng tạo. Người dùng có thể kết hợp với các chương trình, mã lệnh mình viết với giao diện điều khiển mình tạo ra.
Bạn nhấn vào biểu tượng dấu + như hình dưới để tạo mới một giao diện điều khiển mới.

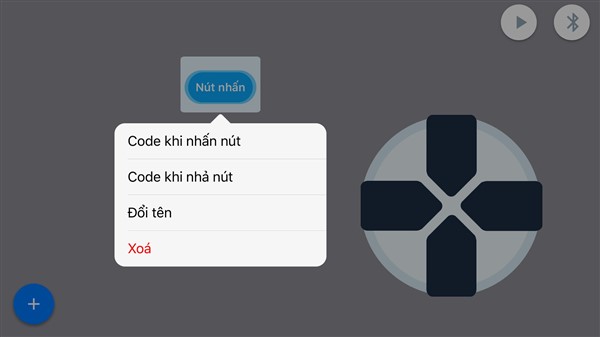
Bạn có thể kéo các control như joystick 360 độ, phím điều hướng, nút nhấn, thanh trượt… vào giao diện.
Trừ joystick hay phím điều hướng là bạn không thể sửa code, các control còn lại bạn có thể sửa code tương ứng với các sự kiện của control. Ví dụ nút nhấn thì có sự kiện là nhấn và nhả ra. Bạn có thể lập trình cho robot di chuyển khi nhấn nút và dừng lại khi thả ra.
Giao diện lập trình sẽ tương tự như giao diện lập trình đã giới thiệu ở trên.


