Đi kèm bộ kit robot xBot là một remote điều khiển từ xa, gồm nhiều nút chức năng, 4 nút di chuyển và 10 nút số. Trong dự án xBot này, chúng ta sẽ cùng tìm hiểu và lập trình để điều khiển xBot bằng remote nhé!
Mục lục
Giới thiệu về remote điều khiển của xBot
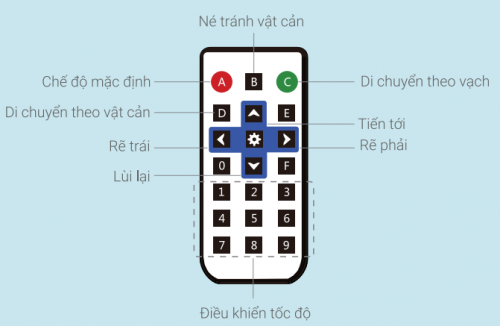
Di chuyển: Dùng các nút mũi tên để di chuyển robot theo các hướng.
Các nút A, B, C, D để thay đổi các chế độ hoạt động có sẵn, bao gồm:
- Điều khiển bằng tay (nút A): Ở chế độ này robot sẽ đứng yên và chờ có tín hiệu điều khiển di chuyển từ remote bằng các nút mũi tên
- Né vật cản (nút B): robot sẽ tự di chuyển tự do và tự né vật cản nếu phát hiện được ở khoảng cách tầm 30 cm.
- Dò đường theo vạch (nút C): robot sẽ đi theo vạch kẻ màu đen trên nền nhà. Chế độ này cần chạy trên bản đồ dò đường đi kèm sản phẩm hoặc chúng ta có thể tự làm cách vạch đen trên nền trắng để robot đi theo.
- Di chuyển theo vật cản (nút D): robot sẽ cố gắng giữ khoảng cách với vật cản phía trước. Nếu vật cản lùi ra xa thì robot sẽ đi tới gần. Và ngược lại nếu vật cản tiến tới gần thì xBot sẽ lùi lại để giữ khoảng cách tầm 20cm.
Các nút số từ 1 đến 9 dùng để thay đổi tốc độ di chuyển của robot. Chúng ta cũng có thể lập trình cho xBot để hoạt động theo ý muốn khi nhấn nút nào đó.
Cách lập trình điều khiển bằng remote
Trước tiên, bạn truy cập vào https://app.ohstem.vn/, chọn sản phẩm xBot và tiếp tục chọn thẻ lập trình để bắt đầu nhé. Trong chương trình này, chúng ta sẽ lập trình để xBot có thể được điều khiển di chuyển bằng các nút mũi tên có trên remote. Chương trình hoàn chỉnh sẽ như sau:
Lập trình di chuyển trên Remote điều khiển
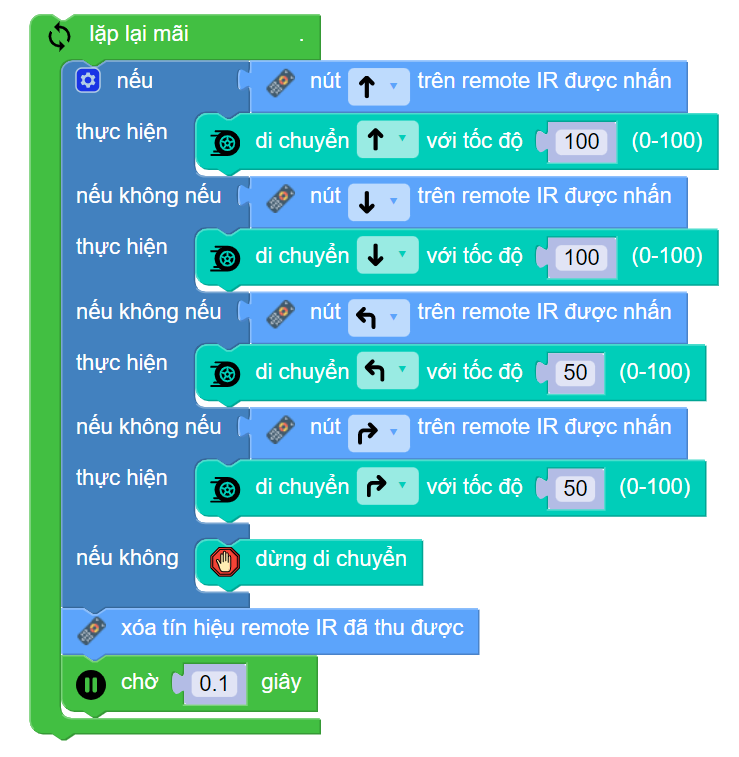
Trong vòng lặp chính, ta sẽ sử dụng khối lệnh điều kiện để đọc các giá trị từ remote:
- Nút Tiến: Di chuyển robot tiến lên với tốc độ 100.
- Nút Lui: Di chuyển robot lui lại với tốc độ 100.
- Nút Trái: Di chuyển robot rẽ trái với tốc độ 50.
- Nút Phải: Di chuyển robot rẽ phải với tốc độ 50.
Ta sử dụng thêm khối lệnh sau để xóa các tín hiệu cũ khi đã nhận từ remote, hai khối lệnh điều kiện trên để tránh trùng lặp các tín hiệu mới:
Đồng thời, bạn nhớ thêm khối lệnh chờ 0,1 giây để thêm khoảng thời gian delay giữa các lần lặp lại.
Thay đổi tốc độ
Để thay đổi được tốc độ, chúng ta sử dụng biến để lưu tốc độ hiện tại và thay đổi nó khi nhận được lệnh từ các nút số. (Nếu các bạn chưa hiểu cách tạo biến hoặc đã quên thì có thể xem tại đây)
![]()
Ban đầu ta cho biến này là giá trị 100, nghĩa là tốc độ tối đa. Để chương trình ngắn gọn, hãy tạo một hàm riêng để xử lý các nút nhấn và thay đổi tốc độ.
Giải thích thêm: Hàm giống như việc bạn tạo ra một khối lệnh mới cho mình, bên trong có các khối lệnh con. Sau khi bạn tạo 1 hàm, trong danh mục HÀM sẽ xuất hiện khối lệnh tương ứng cho bạn.
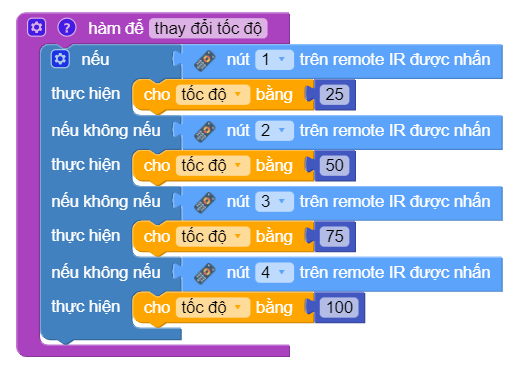
Trong hàm thay đổi tốc độ của xBot, ta sẽ sử dụng khối lệnh điều kiện để đọc các giá trị từ 4 nút số trên remote với tốc độ tương ứng như sau:
- Số 1: 25%
- Số 2: 50%
- Số 3: 75%
- Số 4: 100%
Sau đó, bạn sử dụng hàm thay đổi tốc độ và biến tốc độ vào chương trình cũ, chúng ta có chương trình sau:
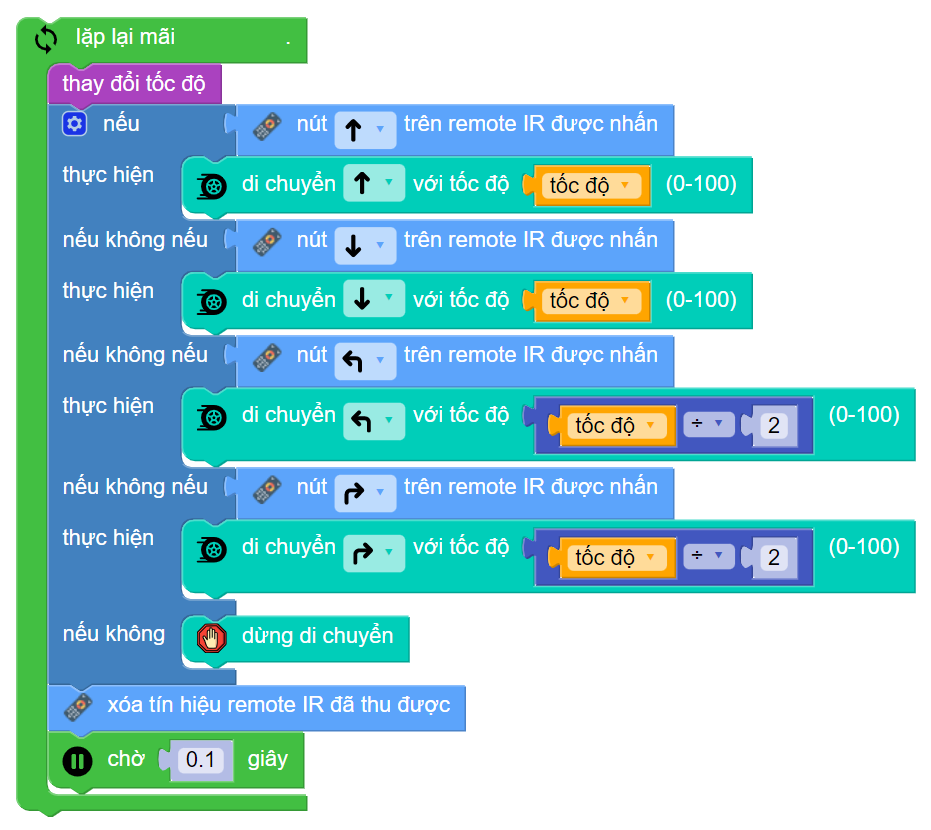
Khi nhấn nút để rẽ trái hoặc phải, ta sẽ cho robot di chuyển với tốc độ bằng một nửa tốc độ được cài đặt, bằng cách dùng khối lệnh tốc độ ÷ 2 (Để robot xBot quay chậm hơn):
![]()
Việc quay trái, phải với tốc độ chậm sẽ làm cho việc điều khiển dễ dàng hơn.
Tải chương trình mẫu
Bạn có thể sử dụng trực tiếp chương trình mẫu chúng tôi đã lập trình sẵn cho bạn tại đây.
Bạn đã thực hiện thành công dự án trên chưa? Hãy chia sẻ với chúng tôi nhé. Chúng tôi rất hy vọng sẽ nhận được phản hồi từ bạn. Liên hệ OhStem hoặc để lại bình luận phía dưới nếu bạn có bất kỳ thắc mắc gì nhé:
- Fanpage: https://www.facebook.com/ohstem.aitt
- Hotline: 08.6666.8168
- Youtube: https://www.youtube.com/c/ohstem