Trong dự án này, với sự hỗ trợ từ Yolo:Bit và động cơ Servo, chúng ta hãy cùng làm một bàn tay mô phỏng với các nguyên liệu đơn giản, dễ tìm kiếm. Các ngón tay sẽ được điều khiển mở ra hoặc nắm lại theo ý thích, dựa trên chuyển động của động cơ Servo.
Hãy cùng thực hiện!

Mục lục
Giới thiệu
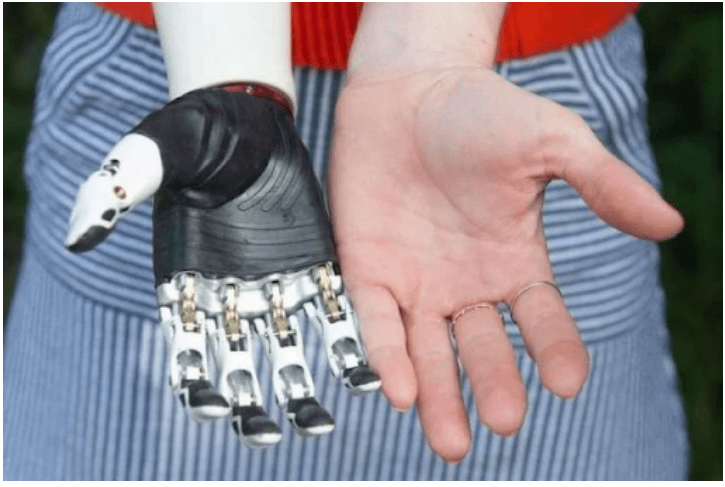
Công nghệ đang đóng vai trò quan trọng trong việc phát triển mô phỏng sinh học, đặc biệt là mô phỏng bàn tay và chân người. Bàn tay mô phỏng hiện đại có khả năng di chuyển linh hoạt và thực hiện nhiều tác vụ, từ cầm nắm đồ vật đến sử dụng công cụ. Chúng cũng được ứng dụng rộng rãi trong việc hỗ trợ người khuyết tật và làm việc trong môi trường nguy hiểm.
Mục tiêu
- Chế tạo mô hình cánh tay robot
- Cách hoạt động của động cơ servo
- Lập trình nhận diện hình ảnh
Hướng dẫn chế tạo mô hình
Chuẩn bị:
- Bộ Yolo:Bit Starter Pack (link: https://ohstem.vn/product/bo-stem-kit-yolobit-starter-pack-v4/)
- Ống hút nhựa loại lớn (đường kính 12mm)
- Servo 180 độ (5 cái) (link: https://ohstem.vn/product/dong-co-servo-mg90s/)
- Dây nilon loại nhỏ
- Mica hoặc giấy bìa carton đã cắt sẵn theo file tại đường link:
https://drive.google.com/drive/folders/1kU9N2N2tMG8tkeE1Q6iUQUcqEU-mA1D3
Chế tạo mô hình:
Bước 1: Chuẩn bị mô hình cánh tay và bàn tay theo file cắt ở trên

Bước 2: Tạo ngón tay
Sử dụng các ống hút và kéo để tạo thành các ngón tay và dán vào phần bàn tay bằng keo silicon:
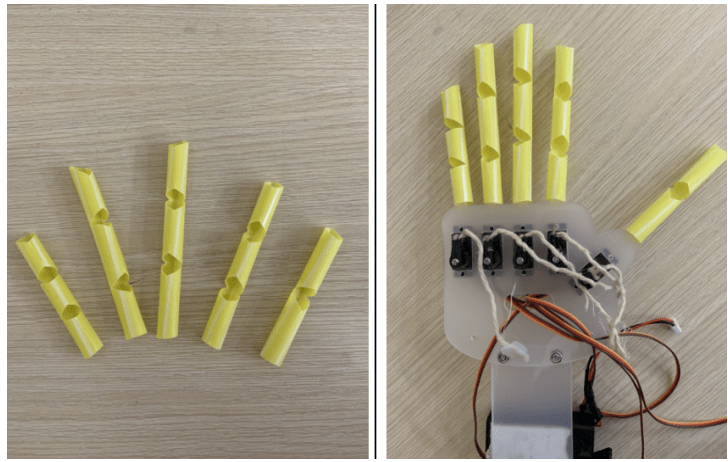
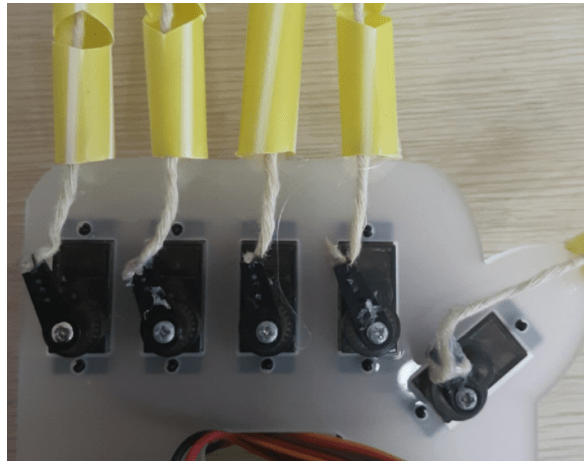
Bước 3: Dán các sợi dây kéo (tương tự như dây gân của ngón tay) vào đầu các ngón tay và cánh servo:
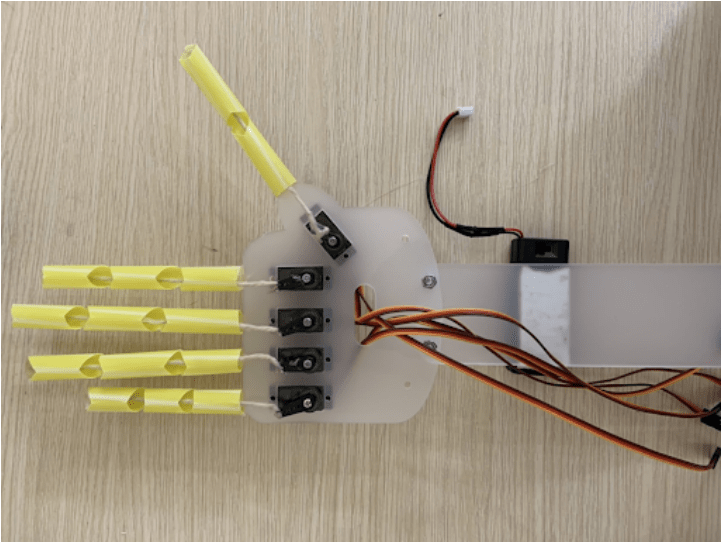
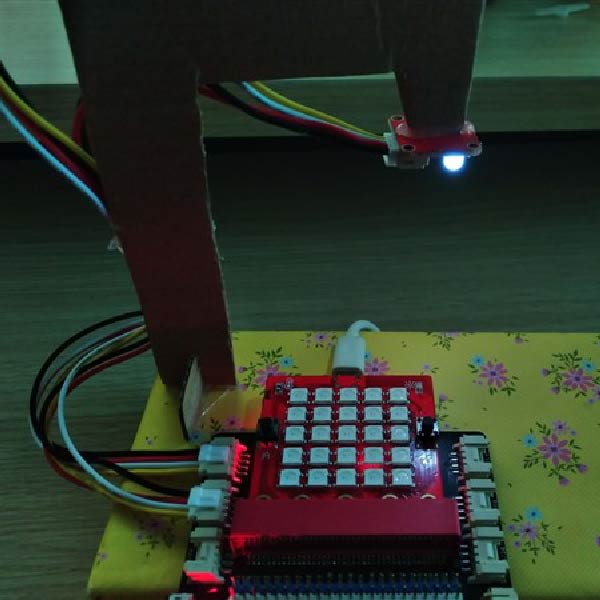
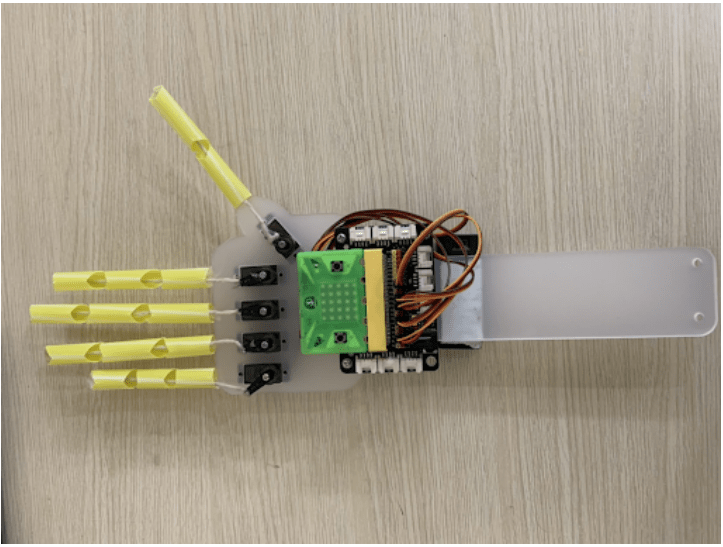
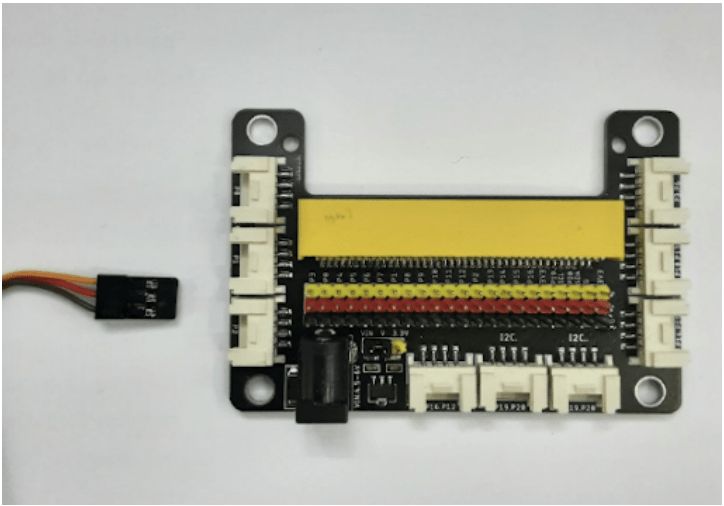
Bước 4: Hoàn thiện cánh tay bằng cách gắn Yolo:Bit và các thiết bị điện tử:
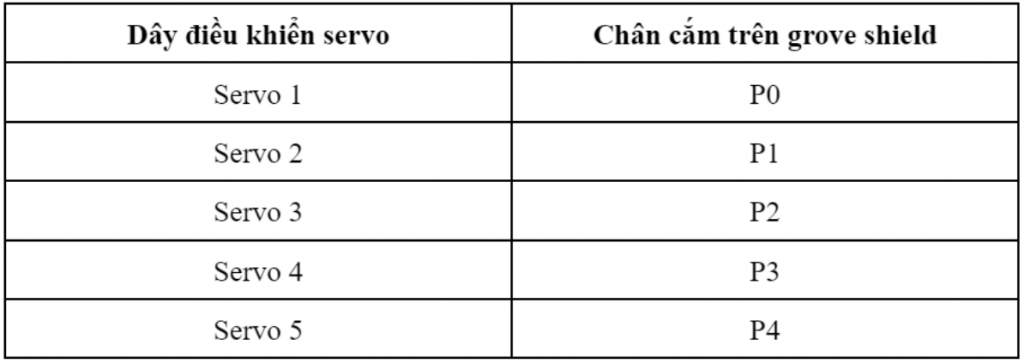
Bước 5: Kết nối dây điều khiển Servo vào mạch mở rộng Yolo:Bit theo thứ tự:
Một vài lưu ý khi làm việc với Servo:
- Bạn cần cắm đúng đầu dây màu CAM của dây servo đúng vào rào màu VÀNG của hàng rào trên mạch mở rộng:
2. Để 5 Servo có thể đồng bộ về góc, bạn cần đưa cả 5 servo về góc 0 độ rồi sau đó gắn cánh servo vào.
Hướng dẫn lập trình
Lập trình bàn tay hoạt động cơ bản
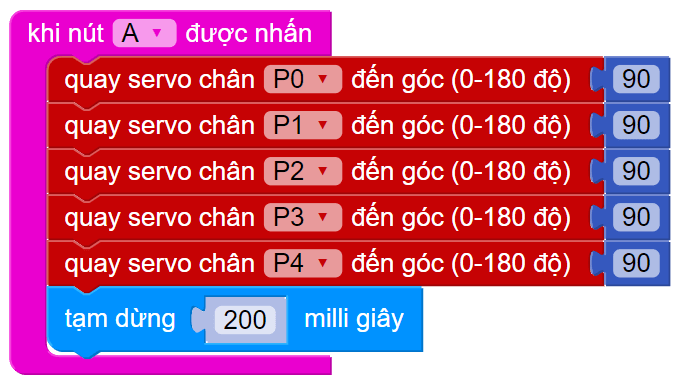
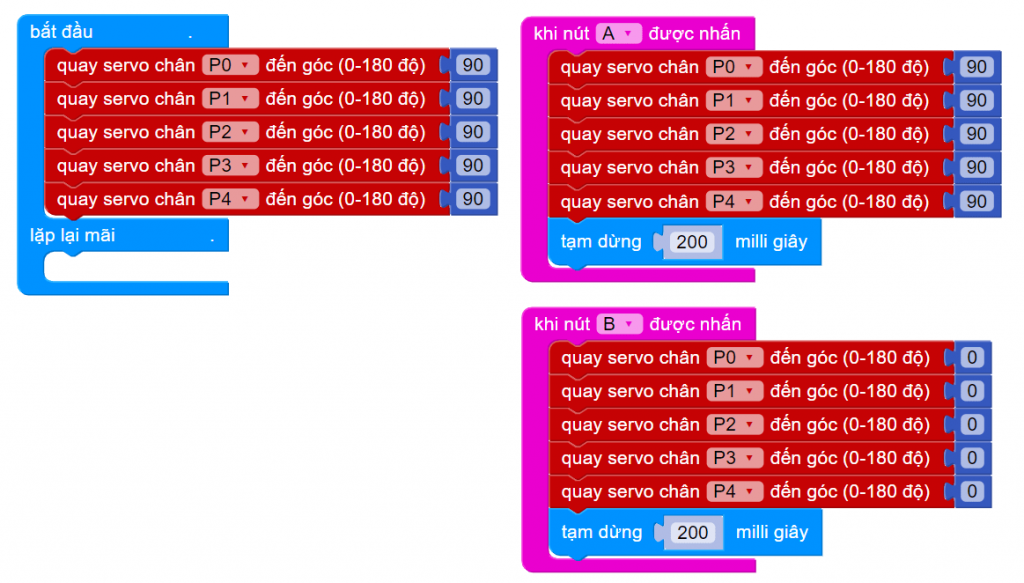
- Khi nhấn nút A: bàn tay nắm lại
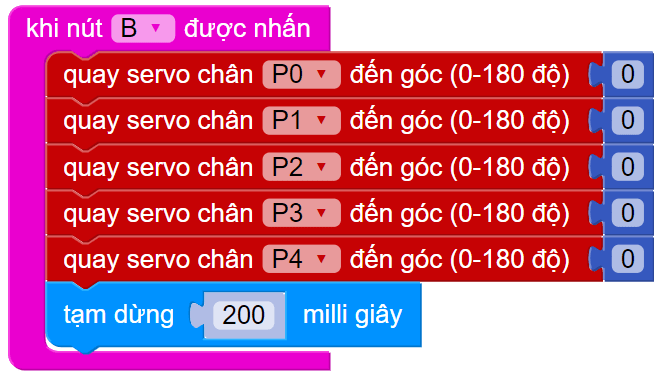
- Khi nhấn nút B: bàn tay xòe ra
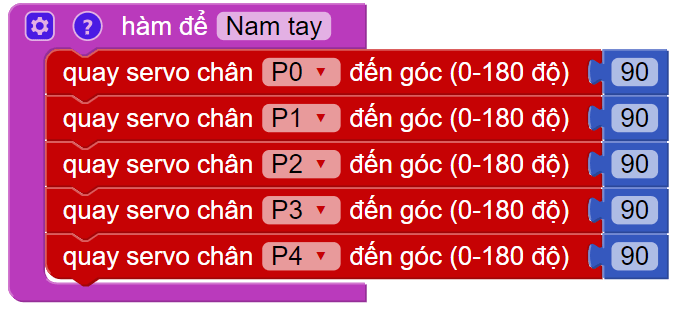
Để bàn tay nắm lại, chúng ta sẽ cho 5 servo đồng thời quay đến góc 90 độ, chương trình sẽ như sau:
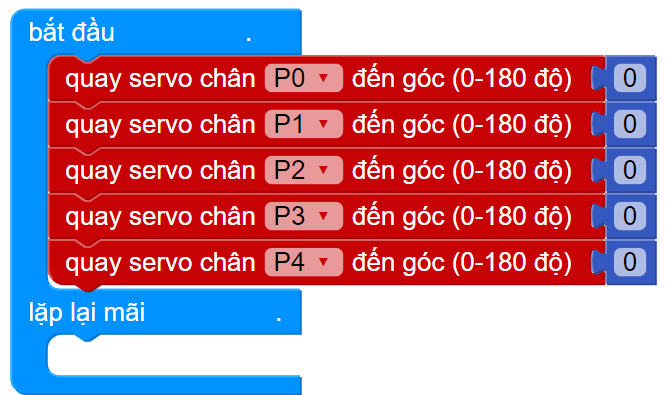
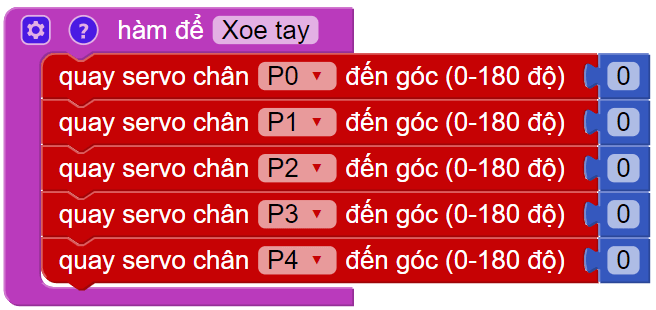
Để bàn tay xòe ra, chúng ta sẽ cho 5 servo đồng thời quay đến góc 0 độ, chương trình sẽ như sau:
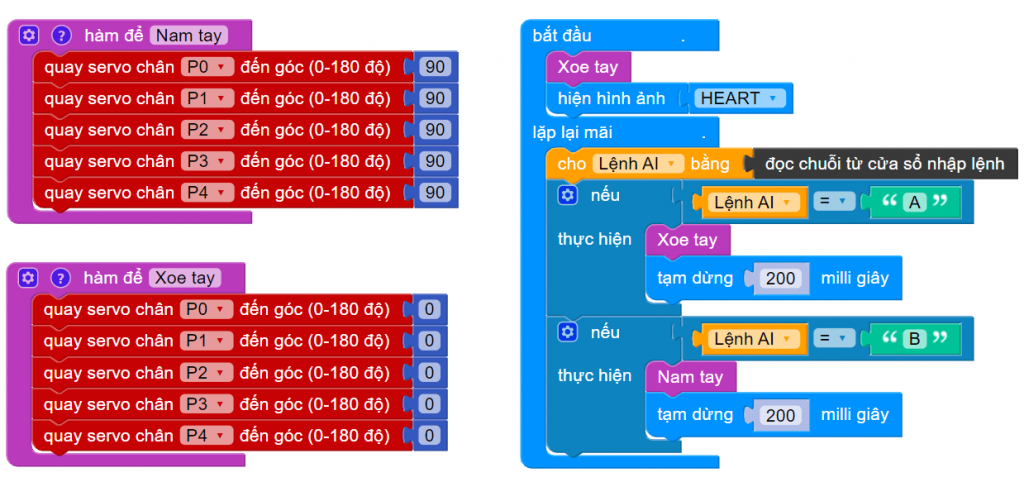
Chương trình hoàn chỉnh sẽ như sau:
Lập trình ứng dụng mô hình AI để điều khiển bàn tay
Với phần này, chúng ta sẽ ứng dụng mô hình AI trong hệ sinh thái OhStem, để lập trình cho bàn tay mô phỏng có thể hoạt động theo cử chỉ bàn tay thực tế của bạn. Chúng ta sẽ tạo 2 mô hình AI chính là nắm tay và xòe tay
Tạo mô hình AI
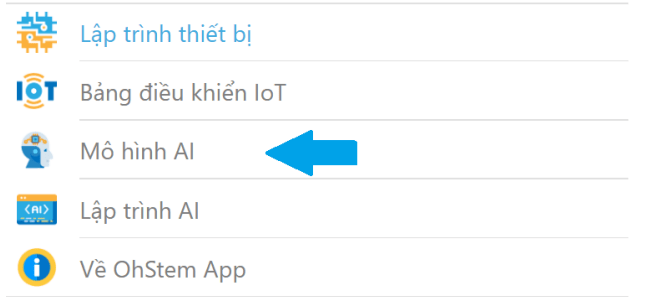
Bước 1: Truy cập link: https://app.ohstem.vn/ sau đó chọn mô hình AI.
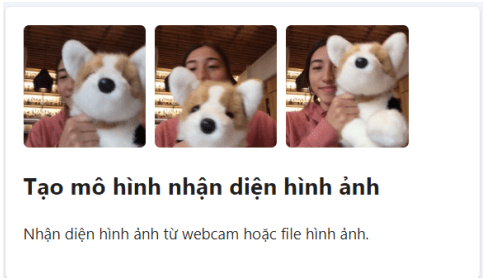
Bước 2: Chọn mô hình nhận diện hình ảnh.
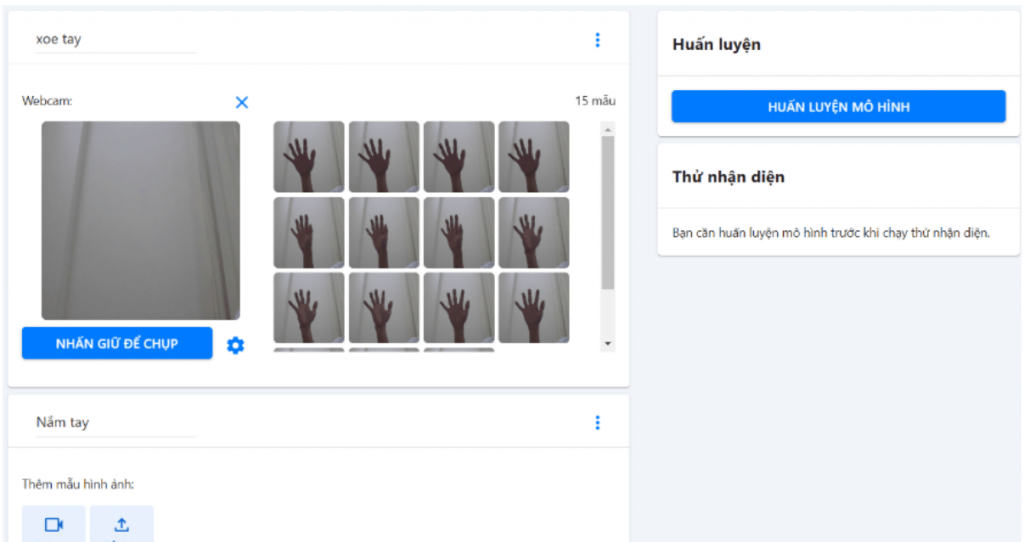
Bước 3: Trong giao diện huấn luyện mẫu, bạn đưa các mẫu hình ảnh xòe bàn tay
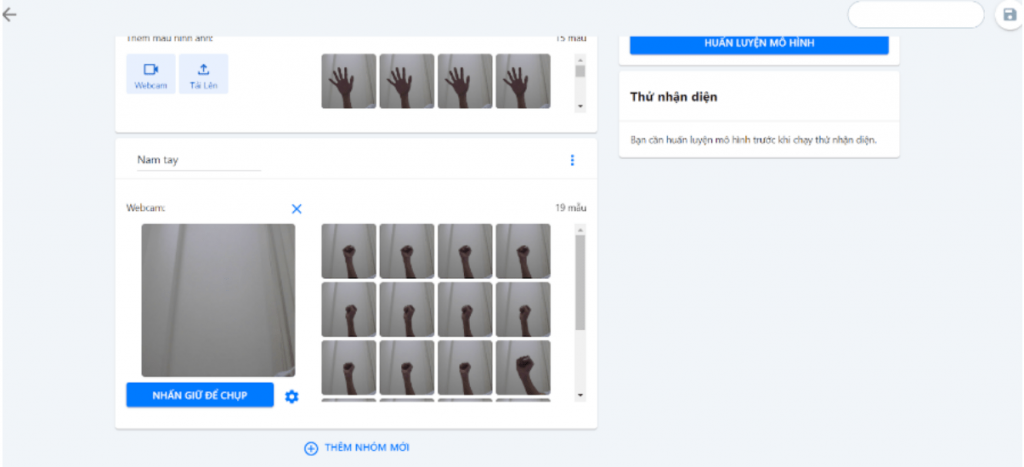
Bước 4: Huấn luyện mô hình nắm tay.
Bước 5: Chọn huấn luyện mô hình
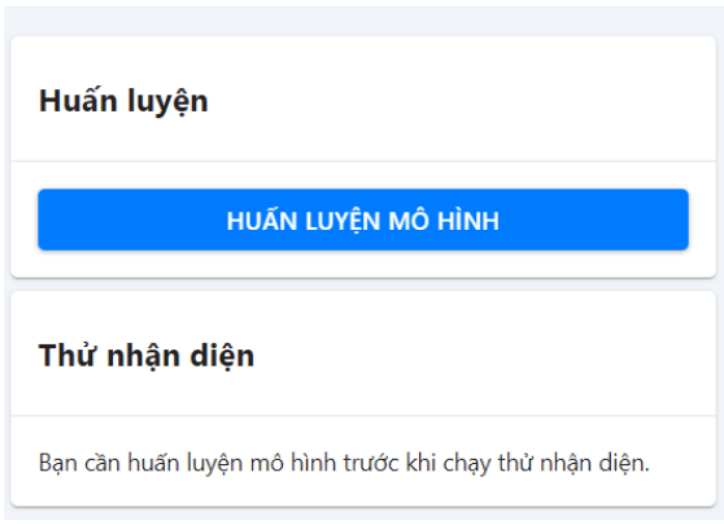
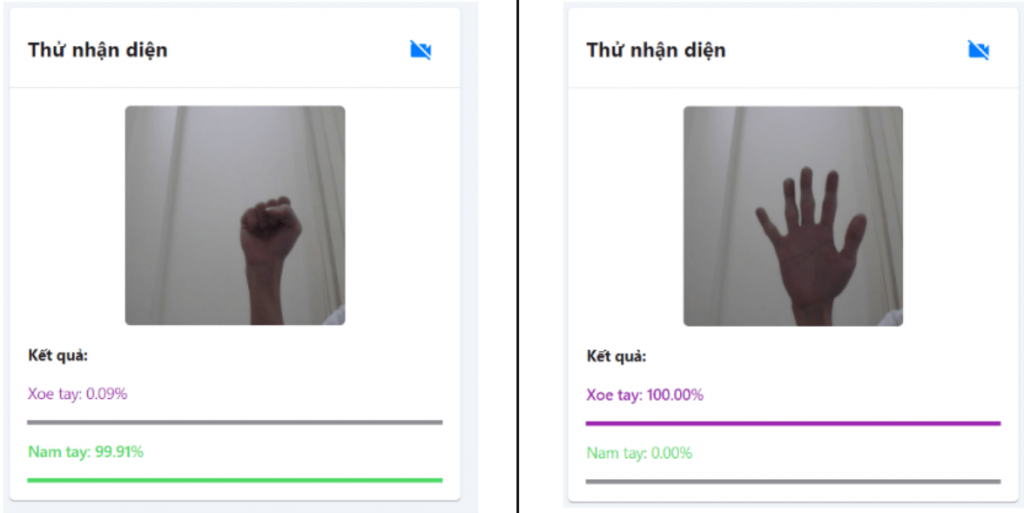
Bước 6: Sau khi huấn luyện xong, bạn có thể thử nhận diện
Bước 7: Đặt tên cho mô hình cần nhận diện, sau đó nhấn vào biểu tượng lưu ở kế bên phải để lưu mô hình
Sau khi nhấn lưu, hệ thống sẽ báo đã lưu thành công
Lập trình nhận diện AI
Bước 1: Mở 1 thẻ mới trên trình duyệt và truy cập link: https://app.ohstem.vn/ sau đó chọn Lập trình AI
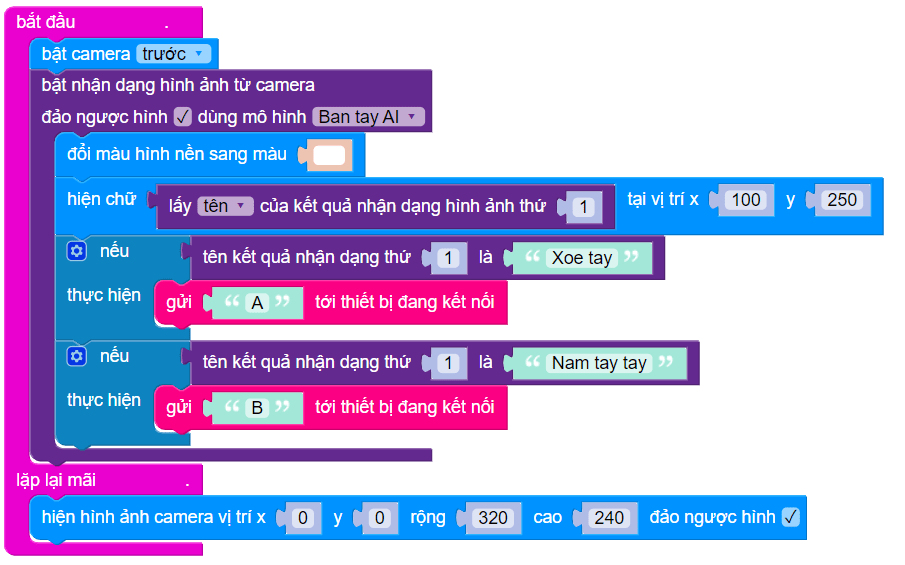
Bước 2: Trong giao diện lập trình, tạo đoạn chương trình
Lập trình cho Yolo:Bit
Bước 1: Mở 1 thẻ mới trên trình duyệt và truy cập link: https://app.ohstem.vn/ sau đó chọn Lập trình thiết bị –> Yolo:Bit –> Lập trình. Trong giao diện lập trình, tạo hàm nắm tay.
Bước 2: Tạo hàm xòe tay
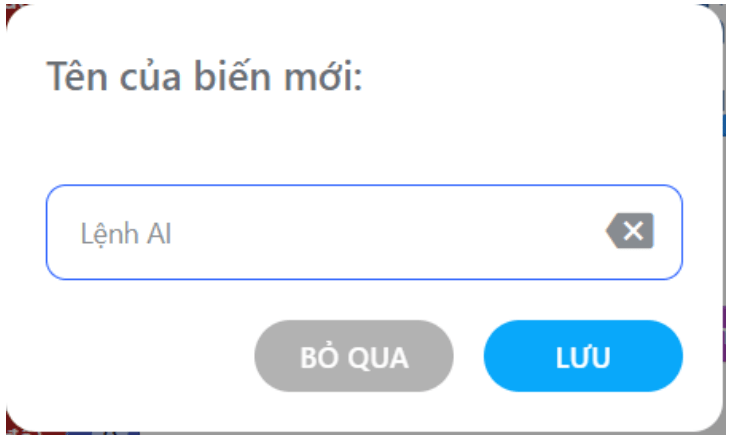
Bước 3: Tạo biến có tên lệnh AI để chứa ký tự nhận được từ chương trình AI
Bước 4: Tạo đoạn chương trình xử lý lệnh được gửi về từ chương trình AI
Bạn có thể tham khảo chương trình tại link:
https://app.ohstem.vn/#!/share/yolobit/2CpJLplgevmS6K3atRwoiwZZgPK
Lời kết
Với dự án này, bạn có thể tạo nhiều mẫu hình hơn, giúp AI nhận diện được nhiều hành động hơn và bàn tay mô phỏng của bạn có hoạt động được nhiều trạng thái hơn!
Để tìm thêm nhiều ý tưởng cho các buổi trải nghiệm STEM hay, bạn hãy tải ngay Ebook miễn phí 100+ ý tưởng STEM chúng tôi đã soạn sẵn cho bạn: