THÔNG BÁO: OhStem sẽ nghỉ Lễ từ thứ Bảy, 31/08 đến hết thứ Ba, 3/9 👉 Các đơn hàng được đặt sau 12:00 trưa thứ Sáu (30/08) sẽ được giao dần từ ngày 4/9.
Phát bài hát và thực hành robot nhảy múa
Trong dự án xBot này, chúng tay hãy thử viết chương trình cho xBot phát ra bài hát quen thuộc là “Kìa con bướm vàng” cùng với thực hành cho robot nhảy múa nhé!
Phát bài nhạc có sẵn
Các nốt nhạc đầu tiên của bài hát này là: ![]()
Trong giai điệu trên, bạn thấy có 2 đoạn nhạc được lặp lại 2 lần. Ta sẽ dùng đến câu lệnh lặp lại để rút gọn chương trình nhé!
Cách viết code Python
Sau khi lập trình xong, chương trình sẽ như sau:
for count in range(2): speaker.play(['C4:1'], wait=True) speaker.play(['D4:1'], wait=True) speaker.play(['E4:1'], wait=True) speaker.play(['C4:1'], wait=True) for count2 in range(2): speaker.play(['E4:1'], wait=True) speaker.play(['F4:1'], wait=True) speaker.play(['G5:1'], wait=True)
Chúng ta cần các nốt nhạc được phát theo thứ tự, vì vậy trong các dòng lệnh ta truyền vào tham số wait = True để chờ nốt nhạc trước phát xong mới thực hiện phát tiếp nốt nhạc tiếp theo.
Trong chương trình trên, có một điều khá khó chịu là thiếu thời gian nghỉ giữa các giai điệu, khiến bài hát được phát liên tục. Liệu có cách nào để chèn một nhịp nghỉ giữa các giai điệu của bài nhạc không?
Để giải quyết vấn đề này, ta sẽ dùng thêm lệnh sleep để chương trình tạm dừng. Hãy thử chèn thêm dòng lệnh time.sleep(0.25) như dưới đây và thử lại nhé.
for count in range(2):
speaker.play(['C4:1'], wait=True)
speaker.play(['D4:1'], wait=True)
speaker.play(['E4:1'], wait=True)
speaker.play(['C4:1'], wait=True)
time.sleep(0.25)
for count2 in range(2):
speaker.play(['E4:1'], wait=True)
speaker.play(['F4:1'], wait=True)
speaker.play(['G5:1'], wait=True)
time.sleep(0.25)
Giới thiệu về chế độ robot nhảy múa của xBot
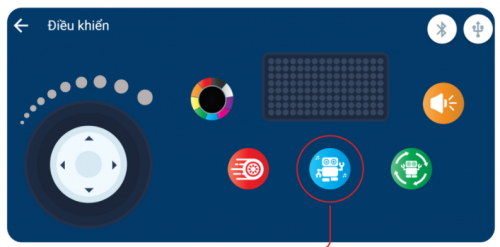
Bạn có thể tham khảo một kiểu nhảy múa mà xBot có sẵn, bằng cách nhấn vào nút Nhảy múa trong giao diện điều khiển của xBot (trên OhStem App – phần mềm đã được giới thiệu ở bài trước)
Bây giờ, chúng ta hãy cùng viết một chương trình để xBot nhảy múa giống như vậy nhé! xBot sẽ thực hiện như sau:
xBot vừa di chuyển vừa phát bài nhạc “WHEELS_ON_BUS”, đồng thời liên tục đổi màu đèn LED RGB. Cụ thể về cách di chuyển của xBot:
- Đi tới 0,5 giây, sau đó lùi lại 0,5 giây (lặp lại 4 lần)
- Lặp lại các hành động rẽ trái >> rẽ phải 4 lần, với thời gian như sau:
- Rẽ trái trong 0,5 giây
- Rẽ phải trong 1 giây (để xBot quay sang phải so với hướng ban đầu)
- Rẽ trái trong 0,5 giây (để quay lại hướng ban đầu)
- Di chuyển tới lui kết hợp rẽ trái, phải (thời gian của từng động tác sẽ như trên, và
được lặp lại 4 lần)
Lập trình robot nhảy múa
Chương trình code python lúc này sẽ như sau:
speaker.play(BIRTHDAY)
for count in range(4):
robot.forward(50,0.5)
led_onboard.show(1, hex_to_rgb('#0000ff'))
led_onboard.show(2, hex_to_rgb('#ffffff'))
robot.backward(50,0.5)
led_onboard.show(1, hex_to_rgb('#ff0000'))
led_onboard.show(2, hex_to_rgb('#ffff00'))
for count2 in range(4):
robot.turn_left(50,0.5)
robot.turn_right(50,1)
led_onboard.show(1, hex_to_rgb('#4b0082'))
led_onboard.show(2, hex_to_rgb('#ffffff'))
robot.turn_left(50,0.5)
for count3 in range(4):
robot.forward(50,0.5)
led_onboard.show(1, hex_to_rgb('#00ff00'))
led_onboard.show(2, hex_to_rgb('#ffa500'))
robot.backward(50,0.5)
led_onboard.show(1, hex_to_rgb('#ff0000'))
led_onboard.show(2, hex_to_rgb('#0000ff'))
robot.turn_left(50,0.5)
robot.turn_right(50,1)
led_onboard.show(1, hex_to_rgb('#ffff00'))
led_onboard.show(2, hex_to_rgb('#ffffff'))
robot.turn_left(50,0.5)


