


Description
Đầu kẹp tay gắp robot ORC là bộ phận không thể thiếu trong các mô hình robot cánh tay gắp, giúp robot thực hiện thao tác cầm, nắm và di chuyển vật thể một cách linh hoạt. Sản phẩm được thiết kế chắc chắn, dễ lắp đặt, phù hợp cho các dự án STEM, nghiên cứu cơ khí và sáng tạo robotics.
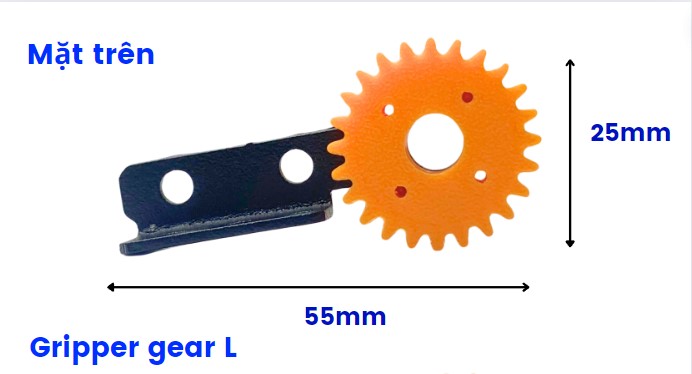
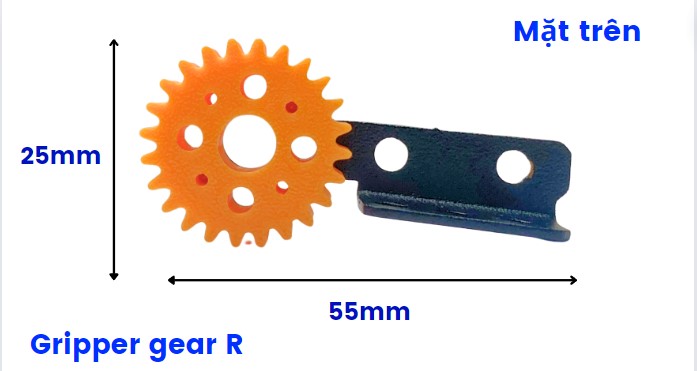
Bộ sản phẩm gồm 1 đầu kẹp L và 1 đầu kẹp R.








