







Description
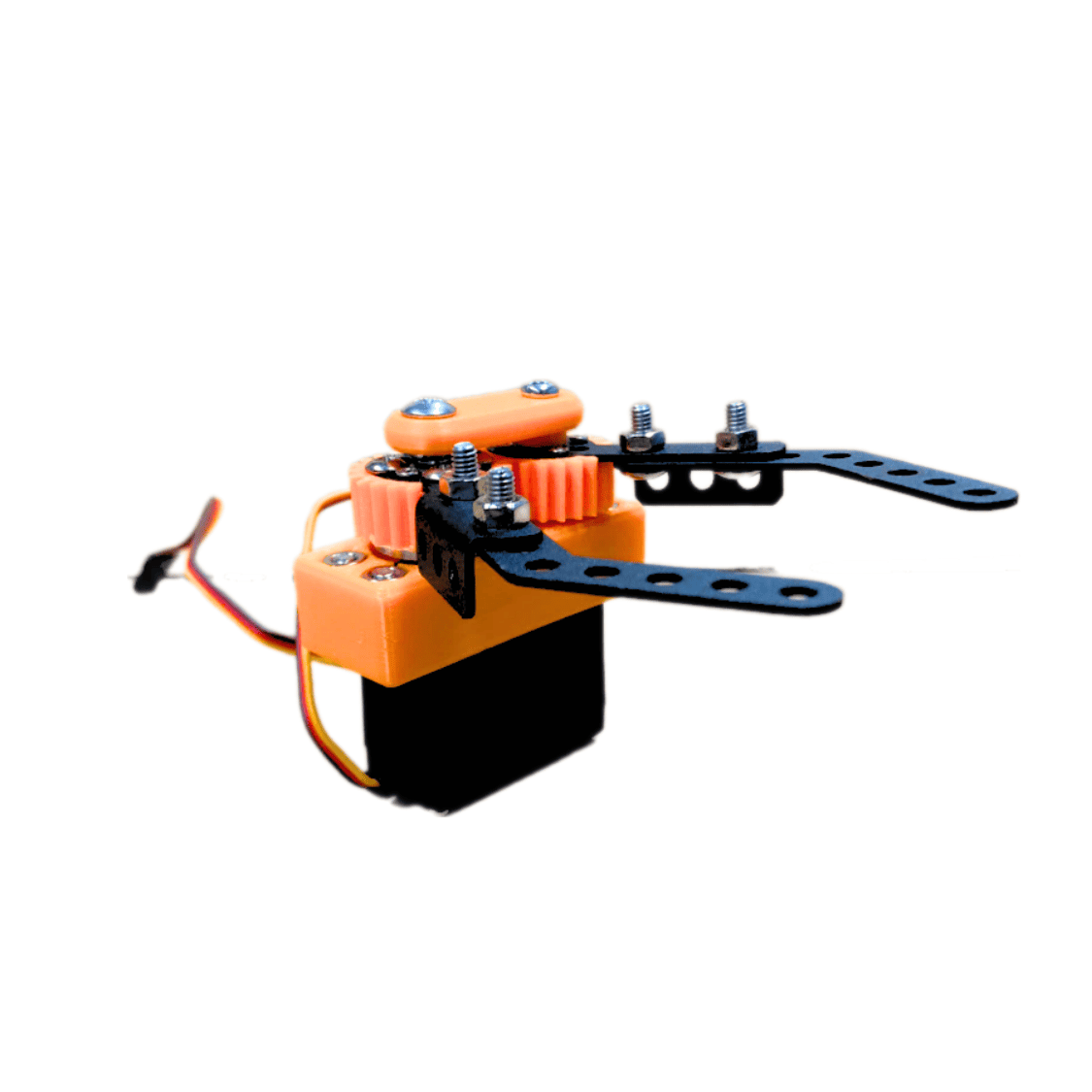
Đầu gắp cho robot ORC K2 được thiết kế để giúp robot thực hiện thao tác gắp, thả và di chuyển các vật thể một cách linh hoạt và chính xác. Sản phẩm được sử dụng trên robot ORC K2, giúp mở rộng tính năng cho robot và thực hiện các nhiệm vụ phức tạp trong dự án STEM, thi đấu Robotics.
Hình ảnh đầu gắp được gắn trên robot ORC K2:

Động cơ sử dụng trong đầu gắp là động cơ Smart Power Servo:
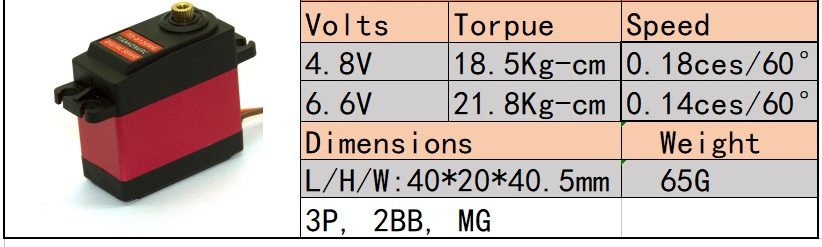
Thông số kỹ thuật của động cơ Servo:
- Điện áp hoạt động: 4,8V – 6,6V (0-180 độ)
- Tốc độ hoạt động: 0,14 – 0,18 giây khi không tải
- Momen xoắn dừng: 18,5kg/cm – 21,8kg/cm
- Trọng lượng: 65g
- Kích thước: 40*20*40,5mm
- Tần số: 333Hz






