How Can We Help?
Cách lập trình robot Car:Bit Version 2
Xe điều khiển thông minh Car:Bit có thiết kế nhỏ gọn với nhiều tính năng thú vị như dò đường, phát hiện vật cản,… Đây là một trong những bộ Kit mở rộng của Yolo:Bit.
Bài viết này sẽ hướng dẫn bạn cách lập trình robot Car:Bit thực hiện những tính năng thông minh theo ý mình.
Giới thiệu
Car:Bit là gì?
Car:Bit là xe điều khiển thông minh có thể lập trình được, được thiết kế để ứng dụng vào giảng dạy STEM cho học sinh và người mới bắt đầu học lập trình. Bộ Kit này sẽ là công cụ giúp trẻ phát triển tư duy sáng tạo và trí tuệ hiệu quả.
Thông qua phương pháp lập trình kéo thả khối lệnh đơn giản, chúng ta có thể xây dựng nhiều tính năng thú vị và độc đáo cho Car:Bit.
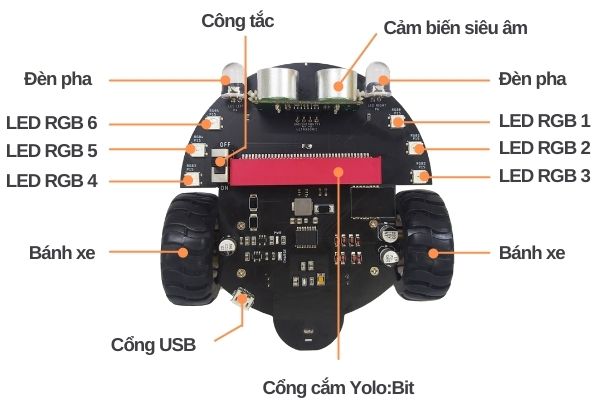
Thành phần của Car:Bit
Mặt trên:
Mặt dưới:
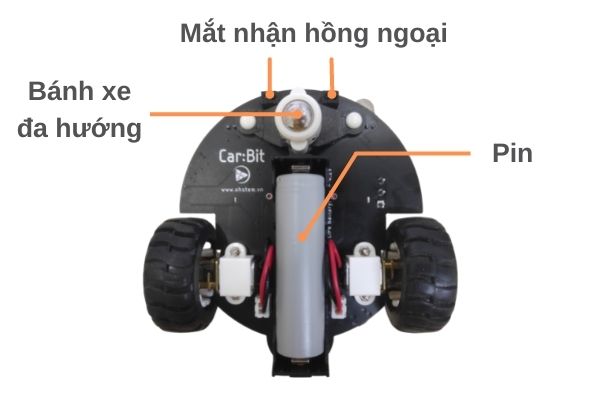
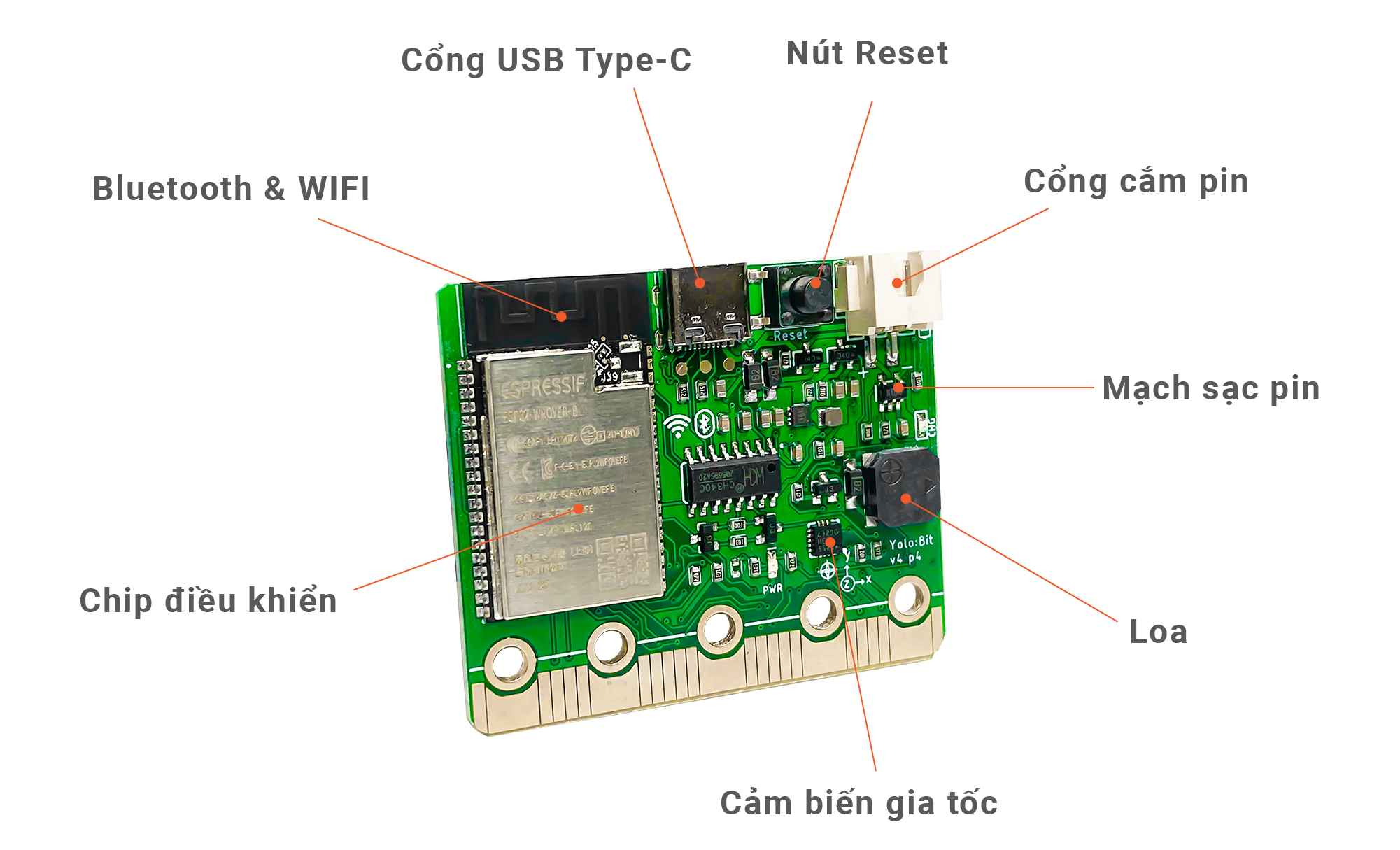
Để Car:Bit có thể hoạt động được, chúng ta cần lắp máy tính lập trình Yolo:Bit vào xe. Tương tự như CPU trong máy tính, Yolo:Bit tựa như “bộ não” có chức năng nhận và xử lý thông tin, từ đó điều khiển Car:Bit hoạt động theo ý muốn.
Giới thiệu về Yolo:Bit
Yolo:Bit là một chiếc máy tính lập trình mini, có kích thước 4×5 cm, có thể lập trình nhiều dự án thú vị và sáng tạo. Yolo:Bit có thể hát nhạc, chớp tắt đèn LED, nhận biết nhiệt độ và độ ẩm xung quanh,… hoặc thậm chí là biến thành máy chơi game cầm tay.
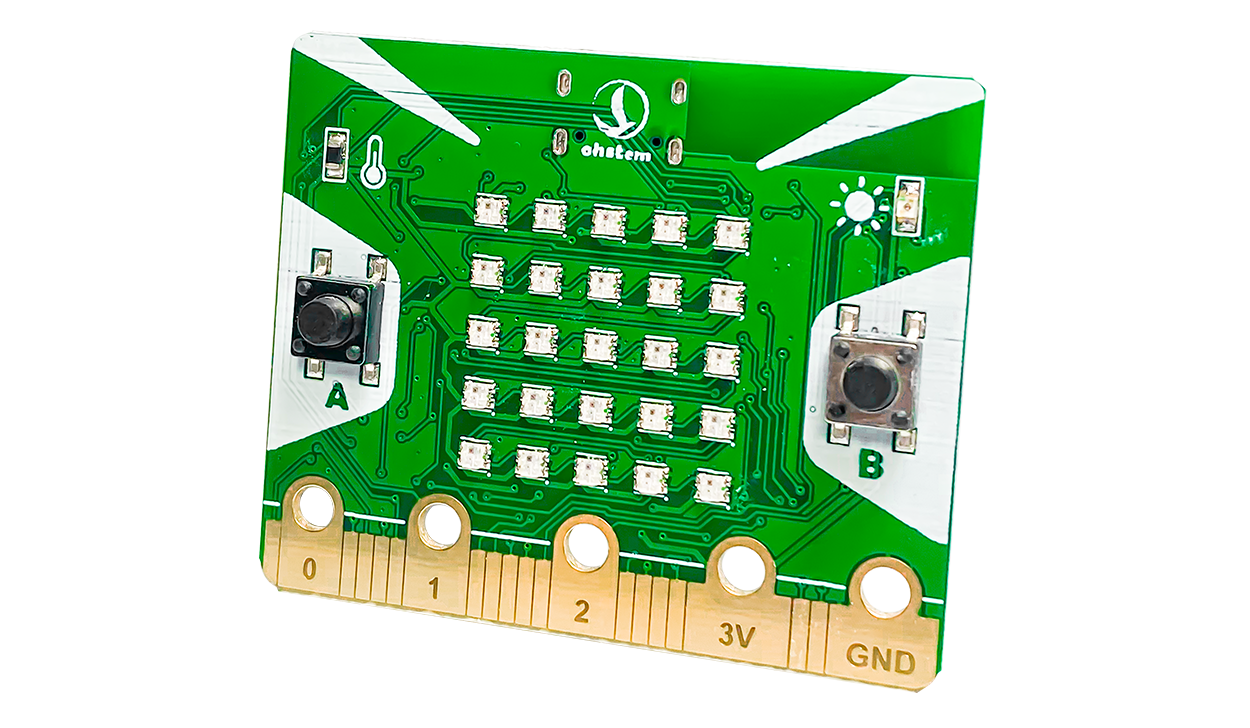
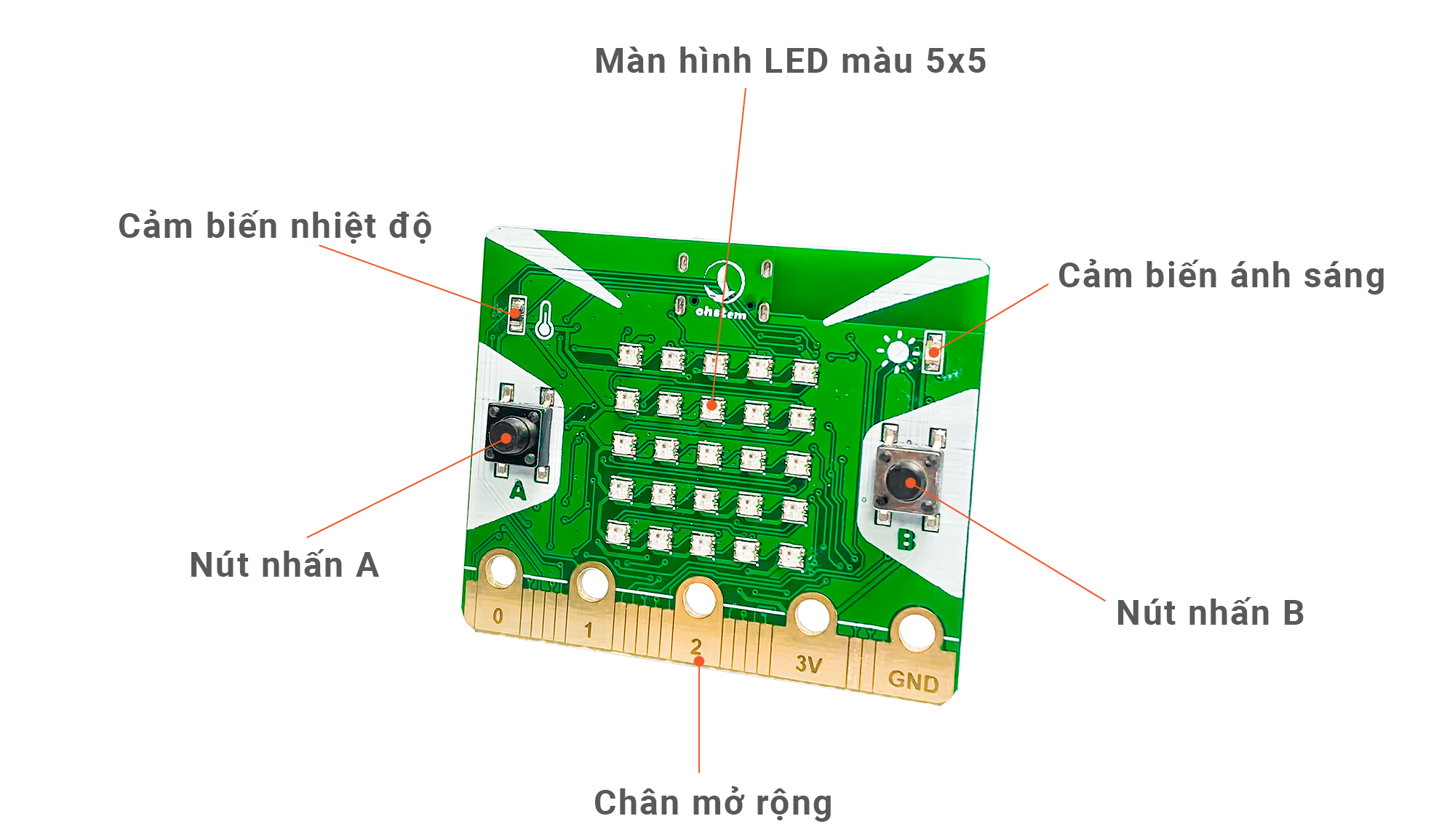
Phía trên Yolo:Bit có 25 đèn LED đa màu và 2 nút nhấn A,B để bạn điều khiển nhân vật trong các trò chơi hoặc đổi bài hát, bật tắt đèn LED,… tùy thích. Bạn cũng có thể lập trình để biến Yolo:Bit thành một chiếc la bàn, có thể nhận biết được các hướng.
Ngoài ra, Yolo:Bit có tích hợp cảm biến ánh sáng, cảm biến nhiệt độ, độ ẩm,… Bạn có thể ứng dụng Yolo:Bit vào lập trình Game, lập trình các dự án IoT, Robotics hoặc nhiều lĩnh vực khác nữa. Trong bài này, chúng ta sẽ sử dụng Yolo:Bit để lập trình điều khiển xe robot Car:Bit.
Cách lập trình Yolo:Bit
Nếu bạn chưa biết các thao tác lập trình cơ bản với Yolo:Bit, bạn có thể xem qua bài viết sau trước khi tìm hiểu cách lập trình robot Car:Bit nhé: Hướng dẫn Yolo:Bit cơ bản
Lưu ý: Chỉ cắm pin có nguồn điện từ 3.7V – 6V vào Yolo:Bit.
Hướng dẫn tải thư viện Car:Bit
Để lập trình cho xe robot Car:Bit, bạn cần phải cài đặt thêm một số khối lệnh mở rộng cho bộ kit này. Các khối lệnh này không có sẵn trong danh sách mặc định của OhStem App.
Bước 1: Trước tiên bạn cần truy cập vào OhStem App tại đây và kết nối với Yolo:Bit theo hướng dẫn ở phần Yolo:Bit cơ bản.
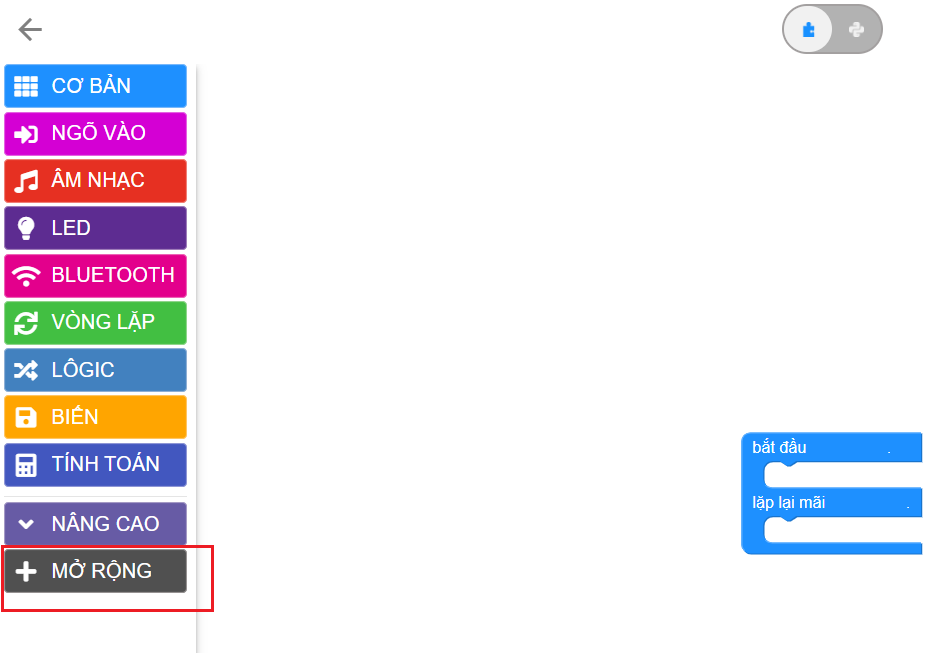
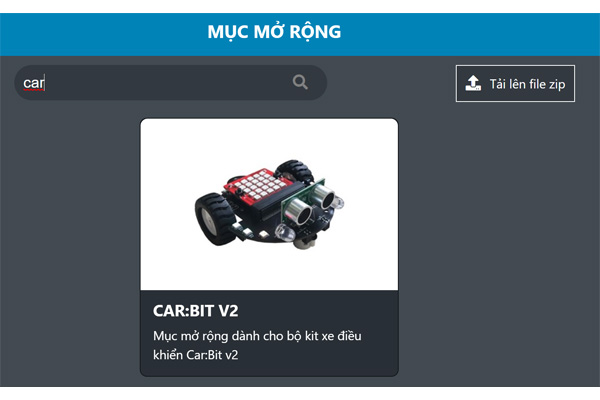
Bước 2: Nhấn vào mục Mở rộng ở danh mục bên trái, tìm kiếm và nhấn vào mục mở rộng tên là Car:Bit V2 để tiến hành cài đặt.
Sau khi click vào thư viện, OhStem App sẽ hỏi bạn có muốn tải thư viện Car:Bit V2 vào Yolo:Bit không, bạn chọn Tải thư viện để tải nhé. Bạn chỉ cần tải 1 lần là được, các lần sau không cần tải lại.
Sau khi cài đặt xong, bộ khối lệnh cho Car:Bit sẽ xuất hiện trong danh sách các mục bên trái.

Nạp chương trình đầy đủ chức năng
Lưu ý trước khi nạp chương trình: Bạn cần gắn pin vào và bật công tắc trên Car:Bit trước khi nạp chương trình, vì nguồn điện từ dây cáp USB sẽ không đủ để Car:Bit di chuyển.
Bạn mở chương trình mẫu sẵn có với đầy đủ các tính năng ở đây, click vào Import project và chạy chương trình theo hướng dẫn ở phần hướng dẫn lập trình cho Yolo:Bit phía trên nhé.
Sau khi chạy chương trình, bạn có thể điều khiển xe robot Car:Bit qua Bluetooth với những tính năng tùy thích:
- Khi nhấn các nút di chuyển: Car:Bit sẽ di chuyển theo hướng tương ứng
- Khi nhấn nút A: bật và tắt đèn pha trái phải
- Khi nhấn nút B: Bật và đổi màu 6 đèn LED RGB trên xe
- Khi nhấn nút C: Bạn đặt xe Robot vào vạch đen trên bản đồ dò line đi kèm sản phẩm và xe sẽ tự đi theo vạch đen
- Khi nhấn nút D: Robot vừa đi vừa tự động né vật cản
Ngoài ra, sau khi kết nối Bluetooth thành công, tất cả đèn LED trên Yolo:Bit sẽ đổi thành màu xanh lá. Ngược lại, khi bị ngắt kết nối, đèn LED chuyển sang màu đỏ.
Lưu ý: Khi xe đang chạy chế độ dò đường hay né vật cản, bạn có thể dùng các phím di chuyển để xe thoát khỏi chế độ hiện tại và chuyển sang chế độ điều khiển bằng tay.
Nếu bạn muốn tìm hiểu cách xây dựng từng bài học, cùng theo dõi hướng dẫn chi tiết bên dưới:
Bài 1: Động cơ và di chuyển
Giới thiệu về động cơ
Động cơ là bộ phận giúp Car:Bit có thể di chuyển trái, phải, tới, lui:


Trong bài này, chúng ta sẽ cùng tìm hiểu cách lập trình robot Car:Bit di chuyển theo ý muốn.
Câu lệnh cần dùng
Di chuyển liên tục
| Câu lệnh | Chức năng |
 |
Di chuyển theo hướng và tốc độ tùy chỉnh |
Chương trình mẫu:
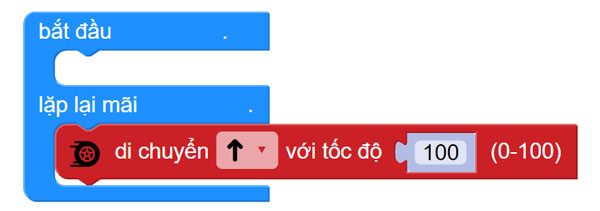
Chương trình trên sẽ điều khiển Car:Bit di chuyển tới trước liên tục với tốc độ 100. Để dừng chương trình, bạn có thể nhấn vào nút dừng trên màn hình:
Di chuyển trong thời gian nhất định
| Câu lệnh | Chức năng |
 |
Di chuyển theo hướng và tốc độ tùy chỉnh trong một khoảng thời gian nhất định |
Chúng ta hãy thử ứng dụng khối lệnh này vào lập trình Car:Bit đi theo hình vuông:

Vì phần chương trình nằm trên phần bắt đầu nên chương trình sau khi kết thúc sẽ dừng lại, không lặp đi lặp lại.
Lưu ý: Bạn cần tinh chỉnh khoảng thời gian xoay phải sao cho phù hợp để Car:Bit xoay vừa đủ một góc 90 độ (vì mỗi robot có thể xoay với vận tốc khác nhau do địa hình, bánh xe và dung lượng pin)
Bài 2: Di chuyển nâng cao
Trong Car:Bit có 2 động cơ trái và phải. Trong bài này, chúng ta sẽ cùng tìm hiểu cách lập trình cho từng động cơ để Car:Bit di chuyển theo ý muốn nhé!
Câu lệnh cần dùng
| Câu lệnh | Chức năng |
 |
Điều khiển từng động cơ trái hoặc phải với tốc độ tùy chỉnh |
Cơ chế di chuyển của Car:Bit
Khi chúng ta lập trình từng động cơ, sẽ có 2 trường hợp xảy ra:
| Trường hợp | Hướng di chuyển |
| Cả 2 đều quay cùng chiều, cùng tốc độ | Car:Bit đi tới hoặc lùi |
| Cả 2 quay cùng chiều, khác tốc độ | Car:Bit rẽ trái (khi động cơ phải quay nhanh hơn) hoặc rẽ phải (khi động cơ trái quay nhanh hơn) |
Chúng ta sẽ ứng dụng chúng vào lập trình cho Car:Bit di chuyển theo hình tròn nhé:

Bạn có thể xem và tải chương trình trực tiếp tại đây
Trong chương trình trên, Car:Bit sẽ đi theo hình tròn và hiển thị hình ảnh trái tim trên màn hình LED của Yolo:Bit trong 3 giây. Sau khi 3 giây kết thúc, Car:Bit sẽ dừng di chuyển và hiển thị mặt cười.
Chương trình trên sẽ được lặp đi lặp lại liên tục.
Bài 3: Bật tắt đèn pha
Trong bài này, chúng ta sẽ cùng tìm hiểu cách lập trình robot Car:Bit tự động bật đèn pha khi trời tối và tắt đèn khi trời sáng.
Câu lệnh cần dùng
| Câu lệnh | Chức năng |
 |
Bật đèn pha bên trái, bên phải hoặc cả 2 đèn trên Car:Bit |
 |
Trả về giá trị độ sáng của môi trường xung quanh |
Chương trình mẫu

Trong chương trình trên, Car:Bit sẽ liên tục kiểm tra độ sáng của môi trường. Khi trời tối (độ sáng ≤ 5), Car:Bit sẽ bật cả 2 đèn pha và ngược lại, khi trời sáng, Car:Bit sẽ tắt đèn.
Bài 4: Xe cảnh sát
Chắc hẳn chúng ta đã quá quen thuộc với những chiếc xe cảnh sát luôn đổi màu đèn liên tục. Trong bài này, chúng ta sẽ cùng học cách lập trình robot để Car:Bit có thể đổi màu đèn tương tự như xe cảnh sát.
Câu lệnh cần dùng
| Câu lệnh | Chức năng |
 |
Bật đèn LED RGB ở vị trí xác định thành màu sắc tùy chỉnh |
Chương trình mẫu

Bạn có thể tải trực tiếp chương trình này tại đây
Theo như chương trình trên, Car:Bit sẽ nhấp nháy đèn LED thành màu xanh và đỏ liên tục.
Bài 5: Hiển thị khoảng cách bằng cảm biến siêu âm
Cảm biến siêu âm là gì?
Cảm biến siêu âm (cảm biến khoảng cách) là thiết bị giúp đo khoảng cách từ cảm biến đến vật cản trước mắt, dựa vào sóng siêu âm. Chúng ta sẽ ứng dụng cảm biến này vào hiển thị khoảng cách lên cửa sổ thông tin nhé!

Cửa sổ thông tin là gì?
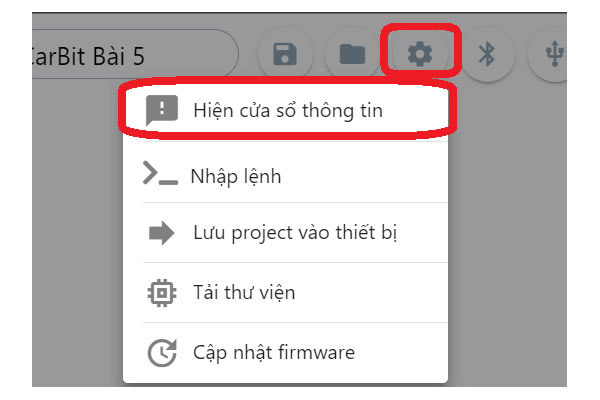
Cửa sổ thông tin là nơi để hiển thị các thông tin được gửi đến từ robot. Để mở cửa sổ thông tin, bạn nhấn vào icon hình bánh răng cưa >> Hiện cửa sổ thông tin:
Câu lệnh cần dùng
| Câu lệnh | Chức năng |
 |
Đọc và trả về giá trị khoảng cách từ cảm biến tới vật thể trước mặt |
 |
Hiển thị thông tin được gửi đến từ robot lên cửa sổ thông tin |
Chương trình mẫu:
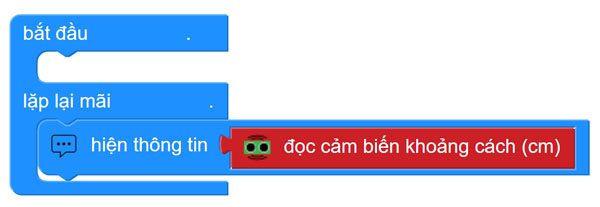
Sau khi chạy chương trình, cửa sổ thông tin sẽ hiển thị như sau:
Bài 6: Robot tránh vật cản
Dựa vào cảm biến siêu âm, chúng ta hoàn toàn có thể lập trình để Car:Bit tự động né tránh vật cản một cách thông minh khi di chuyển. Chúng ta hãy thử tìm cách lập trình robot Car:Bit sao cho xe robot có thể tự động rẽ phải khi gặp phải vật cản nhé (khoảng cách đến vật cản < 15cm). Khi không phát hiện vật cản, Car:Bit sẽ đi thẳng.
Câu lệnh cần dùng
| Câu lệnh | Chức năng |
 |
So sánh khoảng cách đến vật cản với giá trị nhất định và trả về kết quả đúng hoặc sai |
Chương trình sẽ như sau:

Bạn có thể xem trực tiếp chương trình trên tại đây
Khi phát hiện có vật cản ở gần (khoảng cách < 15cm), Car:Bit sẽ bật đèn LED màu đỏ và rẽ phải. Khi không phát hiện vật cản, Car:Bit sẽ đổi đèn LED thành màu xanh và đi thẳng.
Bài 7: Đi theo vật cản
Trong bài này, chúng ta sẽ cùng tìm hiểu cách lập trình robot để biến Car:Bit thành một chiếc xe robot thông minh, có thể tự động di chuyển theo vật cản trước mặt.
Thuật toán của chương trình sẽ như sau:
| Khoảng cách | Cách di chuyển |
| Khoảng cách < 15cm | Lùi lại |
| 20cm < khoảng cách < 40cm | Đi tới trước |
| Trường hợp khác | Dừng lại |
Sau khi áp dụng vào lập trình, chương trình sẽ như sau:
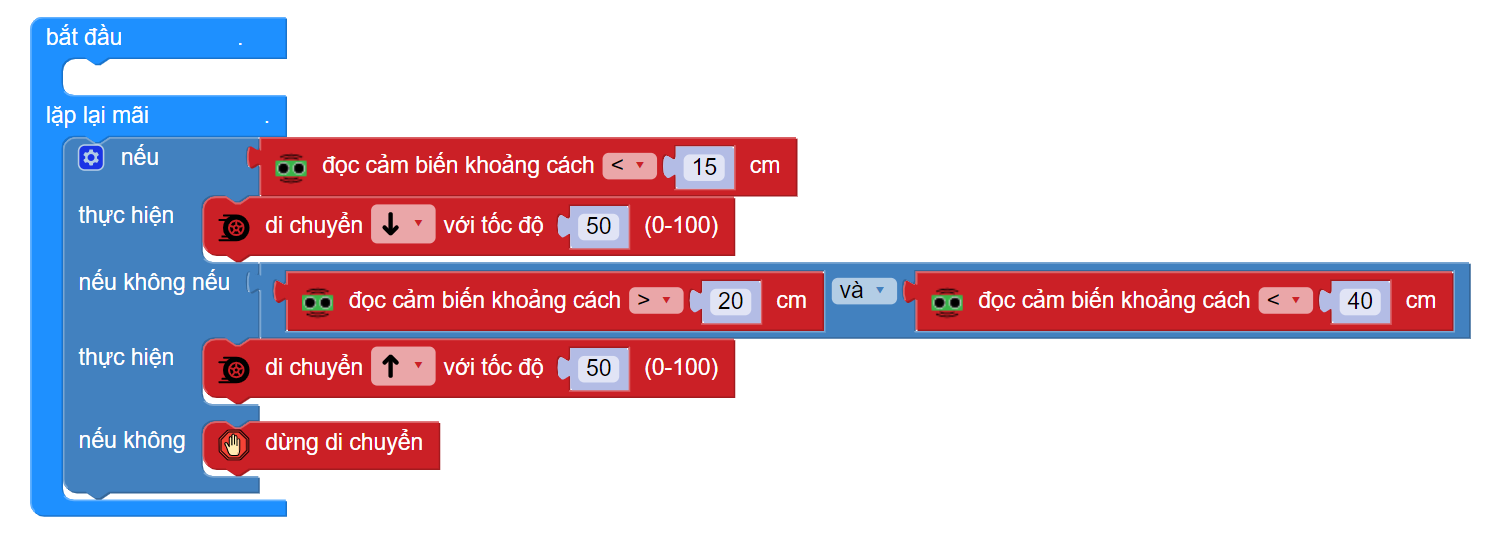
Bạn có thể xem trực tiếp chương trình trên tại đây
Bài 8: Cảm biến dò đường
Cảm biến dò đường là gì?
Trong bài này, chúng ta sẽ làm quen với cảm biến dò đường – module giúp Car:Bit có thể nhận biết được đâu là vạch đen, đâu là nền trắng trên nền.
Dựa vào nguyên lý đo lượng tia hồng ngoại phản xạ trở lại, cảm biến dò đường có thể phát hiện đó là nền trắng hay vạch đen:
| Màu sắc bề mặt | Đặc tính |
| Trắng | Phản xạ lại toàn bộ tia hồng ngoại nhận được |
| Đen | Phản xạ lại rất ít tia hồng ngoại nhận được |
Dựa vào cảm biến dò đường, chúng ta có thể sáng tạo nhiều dự án thú vị với Car:Bit. Trong bài này, chúng ta sẽ cùng lập trình để hiển thị giá trị của cảm biến dò đường lên cửa sổ thông tin, đồng thời bật tắt đèn LED tương ứng.
Câu lệnh cần dùng
| Câu lệnh | Chức năng |
 |
Đọc và trả về giá trị nhận được từ cảm biến dò line bên trái / phải tùy chỉnh |
Chương trình mẫu:
Bạn có thể xem và nạp chương trình bên dưới trực tiếp tại đây

Giải thích chương trình
1. Ban đầu, ta tắt đèn LED và cho hiển thị giá trị nhận được từ cảm biến line trái và phải lên cửa sổ thông tin (Sử dụng khối lệnh tạo văn bản từ trong mục NÂNG CAO >> CHỮ VIẾT)

2. Nếu giá trị từ cảm biến line phải < 3500 (phát hiện vạch đen), ta sẽ bật 3 đèn LED RGB tại bên phải thành màu đỏ, nếu không thì tắt đèn:
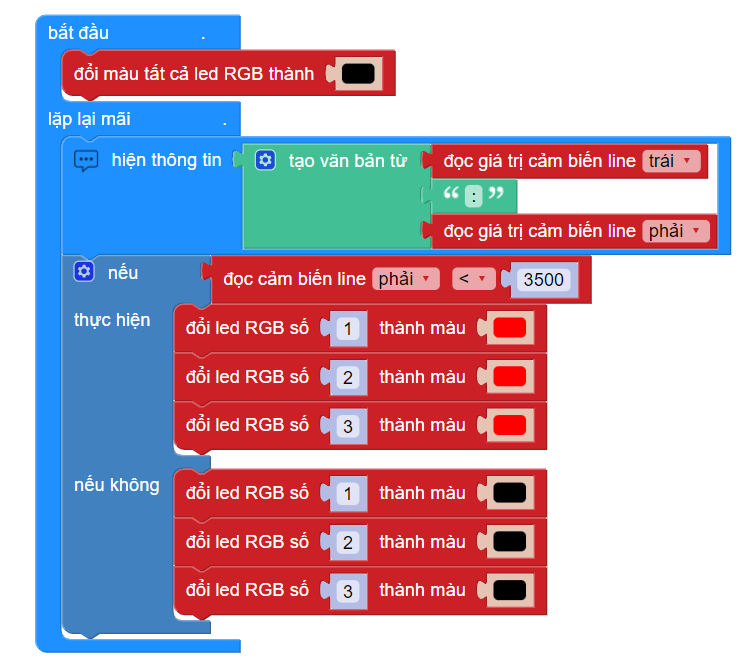
3. Thực hiện tương tự với bên trái và cho tạm dừng toàn bộ chương trình trong khoảng 0,1 giây (1 giây = 1000milli giây):
Kiến thức thêm: Tại các bề mặt bình thường, cảm biến line sẽ đọc được giá trị khoảng 4000.
Bài 9: Robot dò đường
Robot dò đường là một trong những dự án robot được nhiều người biết đến và sử dụng trong các cuộc thi. Trong bài này, chúng ta sẽ cùng tìm hiểu cách lập trình robot Car:Bit sao cho xe robot có thể tự động đi theo vạch kẻ đen trên nền mà không cần sự điều khiển của con người nhé!
Chương trình sẽ như sau:

Bạn có thể xem và tải chương trình trực tiếp tại đây
Giải thích chương trình
1. Nhấn vào icon bánh răng và tạo khối lệnh điều kiện như hình:
2. Khi cảm biến line trái phát hiện vạch đen và cảm biến line phải không phát hiện, Car:Bit sẽ xoay sang trái:
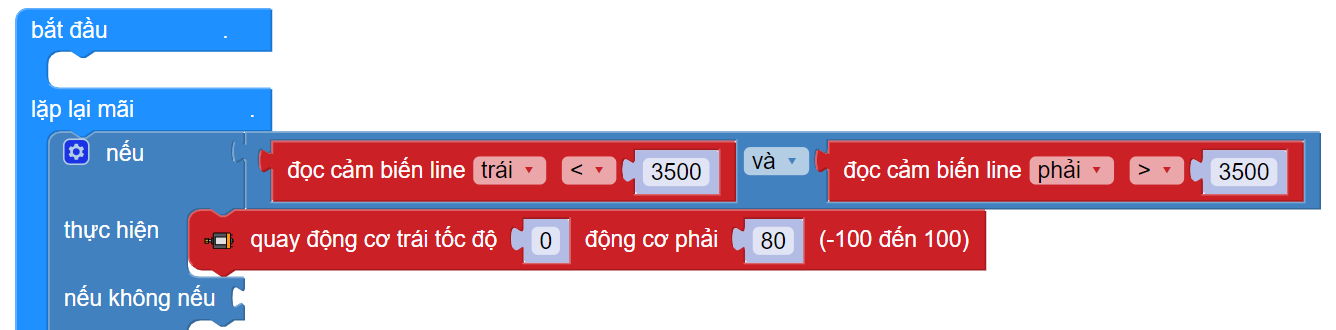
3. Tương tự, khi phát hiện vạch đen bên phải, Car:Bit sẽ xoay sang phải:

4. Khi không phát hiện vạch đen bên trái hay phải (vạch đen nằm giữa), Car:Bit sẽ tiếp tục đi thẳng:
Bài 10: Robot tránh nơi nguy hiểm
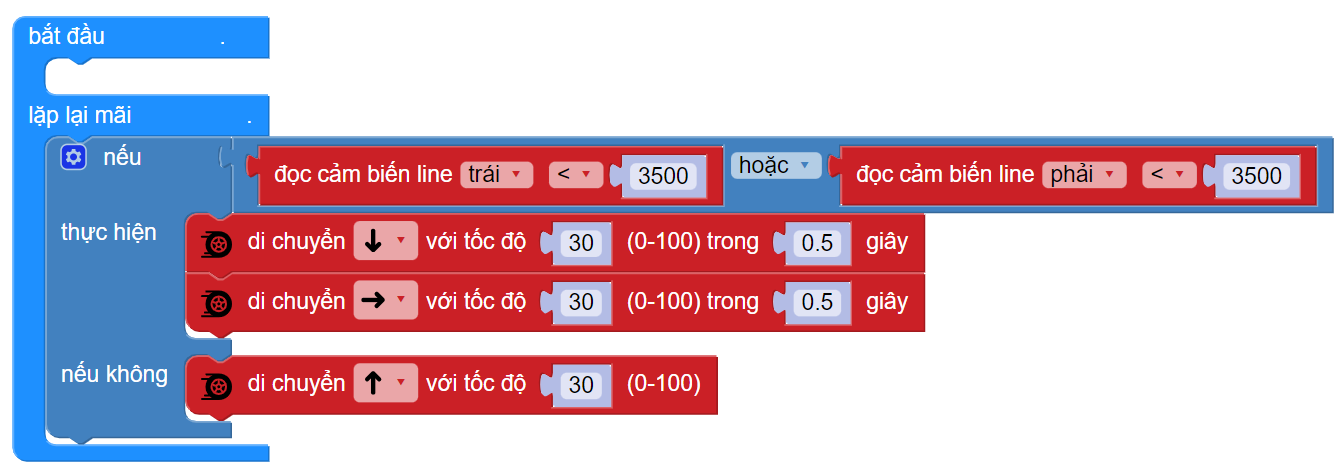
Trong bài này, chúng ta sẽ cùng lập trình 1 chương trình khá thú vị: Robot di chuyển trên mặt bàn và biết tự di chuyển để tránh những nơi nguy hiểm như mép bàn.
Làm sao Car:Bit có thể thực hiện được điều đó? Chúng ta có thể vẽ các vạch đen gần mép bàn và sử dụng cảm biến dò đường để phát hiện vạch đen. Khi nhận thấy có vạch đen, Car:Bit sẽ di chuyển lùi lại và quay sang bên phải.
Trong trường hợp không nhận thấy vạch đen, Car:Bit sẽ di chuyển thẳng tới phía trước.
Chương trình sẽ như sau:
Bạn có thể truy cập và xem trực tiếp chương trình tại đây
Lưu ý: Để an toàn và đảm bảo hơn, bạn có thể thử nghiệm chương trình này trên sàn nhà trước khi cho Car:Bit chạy trên mặt bàn nhé.
Bài 11: Robot vận chuyển
Bạn đã bao giờ quan sát các robot vận chuyển hàng hóa trong nhà máy chưa? Các robot này sẽ liên tục di chuyển từ điểm A đến điểm B cố định và lặp đi lặp lại liên tục để vận chuyển hàng hóa.
Trong bài này, chúng ta sẽ tìm hiểu cách lập trình robot Car:Bit mô phỏng 1 xe robot như vậy nhé!
Thuật toán
Để Car:Bit biết được đâu là điểm A (điểm bắt đầu) và điểm B (điểm kết thúc), chúng ta sẽ sử dụng 1 đường kẻ đen trên nền với 2 vạch ngang ở 2 đầu như hình:

Trong dự án này, chúng ta sẽ tiếp tục ứng dụng cảm biến dò đường. Cách lập trình robot Car:Bit lúc này như sau:
- Áp dụng lại chương trình robot dò đường ở bài trước, để robot có thể tự động đi theo đường line từ điểm A đến điểm B như ý muốn của chúng ta
- Trong trường hợp phát hiện vạch chắn ngang (cả 2 mắt đọc của cảm biến line đều thấy vạch đen), Car:Bit sẽ liên tục xoay sang phải (hoặc sang trái tùy thích) cho đến khi mắt đọc phát hiện vạch đen
Chương trình lúc này sẽ được lập trình như sau:

Bạn có thể xem và nạp trực tiếp chương trình tại đường dẫn này
Giải thích chương trình
1. Bắt đầu với chương trình Robot dò đường ở bài trước:
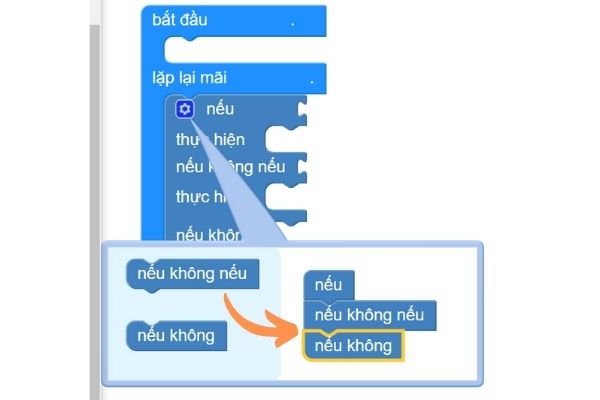
2. Thêm một khối lệnh Nếu không nếu vào giữa và đặt điều kiện: khi cả 2 mắt đọc đều phát hiện vạch đen, ta sẽ cho robot xoay sang phải liên tục cho đến khi cảm biến line phải phát hiện vạch đen:
Lời kết
Trên đây là những hướng dẫn cơ bản nhất để sử dụng và điều khiển xe Car:Bit. Bên cạnh đó, Car:Bit còn có rất nhiều tính năng và cách chơi thú vị đang chờ khám phá! Hãy thử sức sáng tạo nhiều hơn nhé!
Liên hệ với chúng tôi qua Fanpage nếu bạn có bất kỳ thắc mắc nào cần được giải đáp.


