Trong dự án xBot này, chúng ta sẽ viết một chương trình để giải cứu robot xBot:
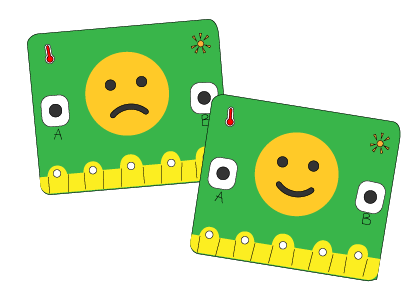
- Khi robot bị lật ngửa lại, robot sẽ bật đèn đa sắc màu đỏ sẽ phát ra nhạc báo động cầu cứu chúng ta.
- Khi ta lật robot về trạng thái bình thường thì đèn đa sắc sẽ bật màu xanh lá và tắt nhạc báo động.
Mục lục
Lập trình

Giải thích chương trình
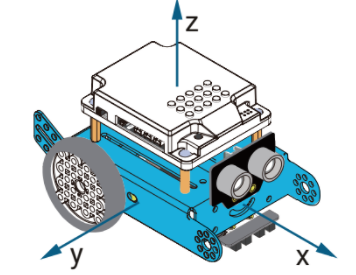
Như ta đã biết ở bài Đọc cảm biến gia tốc, để biết robot đang nằm úp hay nằm ngửa thì ta sẽ đọc trục Z của cảm biến gia tốc.
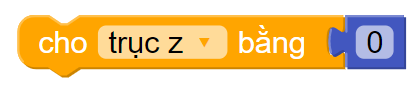
Bạn cần tạo một biến tên là “trục z“. Ban đầu biến đếm sẽ được gán giá trị là 0.

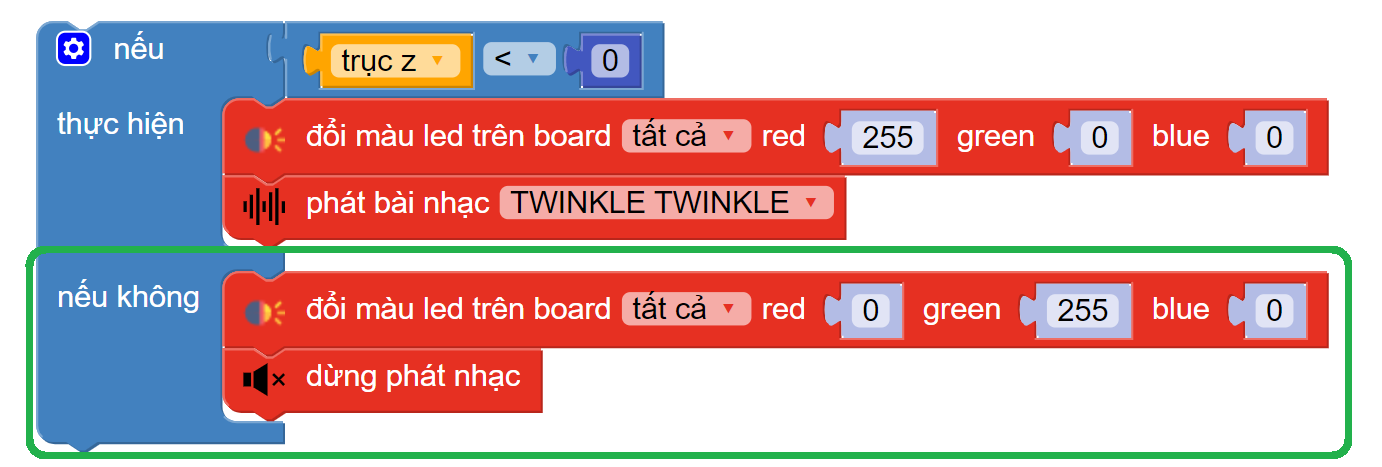
Trong vòng lặp chính, ta sẽ gán biến “trục z” bằng giá trị trục z của cảm biến. Đồng thời dùng câu lệnh điều kiện để kiểm tra giá trị biến “trục z” với 0:
- Nếu biến “trục z” nhỏ hơn 0 thì đèn bên trái màu đỏ và phát ra bài nhạc TWINKLE TWINKLE.
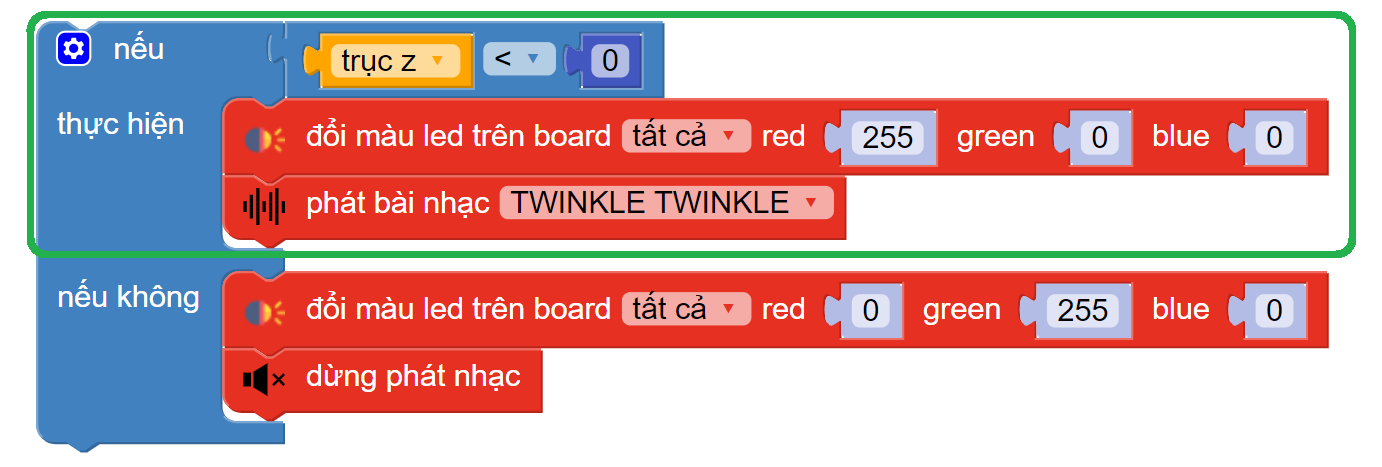
- Nếu biến “trục z” lớn hơn 0 thì đèn bên phải màu xanh lá và tắt nhạc.
Bạn hay thử lật úp và ngửa robot để kiểm tra thành quả. Bạn có thể thay đổi bài hát bạn muốn hoặc thay đổi các giá trị màu sắc theo ý thích nhé!
Tải chương trình mẫu
Bạn có thể sử dụng trực tiếp chương trình mẫu chúng tôi đã lập trình sẵn cho bạn tại đây.
Bạn đã thực hiện thành công dự án trên chưa? Hãy chia sẻ với chúng tôi nhé. Chúng tôi rất hy vọng sẽ nhận được phản hồi từ bạn.
Để tìm hiểu và đặt hàng robot STEM xBot, bạn có thể tham khảo tại đường dẫn sau: đồ chơi STEM xBot
Liên hệ OhStem hoặc để lại bình luận phía dưới nếu bạn có bất kỳ thắc mắc gì nhé:
- Fanpage: https://www.facebook.com/ohstem.aitt
- Hotline: 08.6666.8168
- Youtube: https://www.youtube.com/c/ohstem