Cánh tay robot gắp sản phẩm là một loại cánh tay cơ khí, thường là có thể lập trình, với các chức năng tương tự như một cánh tay con người. Cánh tay robot này có thể là một dự án hoàn chỉnh hoặc có thể là một phần của một con rô bốt phức tạp hơn. Hãy cùng OhStem tìm hiểu về các loại cánh tay robot hiện đại này nhé!
Mục lục
Cách hoạt động của cánh tay robot gắp sản phẩm
Các liên kết của cánh tay robot gắp sản phẩm được kết nối bằng các khớp cho phép chuyển động quay mọi hướng trong không gian (chẳng hạn như trong rô bốt có khớp nối) hoặc chuyển động tịnh tiến (tuyến tính). Các mắt xích của bộ điều khiển cánh tay robot gắp sản phẩm có thể tạo thành một chuỗi động học.

- Robot Cartesian / Gantry robot : Được sử dụng để di chuyển và lắp ráp các loại hàng hóa, ứng dụng vào các các hoạt động lắp ráp, xử lý các loại công cụ và hàn hồ quang. Đó là một robot có cánh tay có ba khớp hình lăng trụ, trục của chúng trùng khớp với một bộ điều phối Descartes.
- Robot hình trụ : Được sử dụng cho các hoạt động lắp ráp, xử lý máy công cụ, hàn điểm và xử lý tại máy đúc khuôn. Đây là một robot có các trục tạo thành một hệ tọa độ hình trụ.
- Robot hình cầu : Được sử dụng để xử lý, hàn, đúc khuôn, lấy máy, hàn khí và hàn hồ quang. Đây là một robot có các trục tạo thành một hệ tọa độ cực.
- Robot SCARA : Được sử dụng để chọn và đặt các loại hàng hóa, các hoạt động lắp ráp và xử lý các công cụ khác. Robot này có hai khớp quay song song để cung cấp khả năng hoạt động trong một mặt phẳng.
- Robot khớp nối : Được sử dụng cho các hoạt động lắp ráp, máy lấy mẫu, hàn khí, hàn hồ quang và phun sơn. Đây là một cánh tay robot hiện đại có ít nhất ba khớp quay.
- Robot song song : Một công dụng chính của loại cánh tay robot này là khả năng di động, mô phỏng buồng lái của một chuyến bay. Đây là một cánh tay robot hiện đại có các khớp lăng trụ hoặc khớp quay đồng thời.
- Robot nhân hình : Cánh tay robot này có hình dáng giống bàn tay người, tức là có các ngón tay và ngón cái độc lập.
 Robot khớp 6 trục từ KUKA |  Con người + triển lãm |  uArm Metal Comercial Robot Arm |  Cánh tay robot nguồn mở MeArm |
Cánh tay robot gắp sản phẩm đáng chú ý
Trong không gian, các cánh tay robot Canadarm và phiên bản kế nhiệm của nó – Canadarm2 là ví dụ về mức độ hoạt động tự do cánh tay robot. Những cánh tay robot này đã được sử dụng để thực hiện nhiều nhiệm vụ khác nhau như kiểm tra Tàu con thoi bằng cách sử dụng một thiết bị đặc biệt, được kết hợp với các camera và cảm biến, cũng như các hoạt động triển khai và thu hồi vệ tinh từ khoang chở hàng của Tàu con thoi .
Một cánh tay robot hiện đại khác cần chú ý là TAGSAM – dùng để thu thập mẫu tại các tiểu hành tinh nhỏ trong không gian. Cánh tay robot này được gắn trên tàu vũ trụ OSIRIS-REx .
Ngoài ra, con tàu đổ bộ Sao Hỏa năm 2018 – InSight có một cánh tay robot gắp sản phẩm được gọi là IDA. Cánh tay này có máy ảnh, grappler, được sử dụng để di chuyển các dụng cụ đặc biệt.
Hoạt ảnh của máy đo địa chấn được cánh tay robot nâng lên khỏi đĩa và đặt trên bề mặt sao Hỏa
Cánh tay robot chi phí thấp
Trong thập kỷ 2010, chi phí sản xuất các loại cánh tay robot nói chung hoặc cánh tay robot gắp sản phẩm nói riêng đã giảm mạnh. Các cánh tay robot đã bắt đầu xuất hiện trên thị trường dưới dạng các thiết bị giáo dục hoặc các mon đồ chơi công nghệ thú vị, tùy theo ở thích từng người. Ngoài ra, các ứng dụng của cánh tay robot gắp sản phẩm trong các phòng LAB đã được đề xuất, chẳng hạn như việc sử dụng chúng làm thiết bị lấy mẫu tự động.
Cùng xem qua bảng tóm tắt về các cánh tay robot với chi phí thấp, và thông số kỹ thuật khác nhau của chúng.
| Mô hình | Công ty | Axes | Độ lặp lại (mm) | Tải trọng tối đa (g) | Tốc độ góc tối đa (độ / s) | Phạm vi tiếp cận dọc (cm) | Phạm vi tiếp cận ngang (cm) | Hiệu ứng cuối | Cost (USD) | Website | Thông số kỹ thuật đầy đủ |
| trục gá | trục gá | 5 | 0.025 | 1134 | 150 | 86.3 | 58.4 | Laser, máy ảnh, bộ kẹp, giá đỡ công cụ | $1,500.00 | dorna.ai | Đặc điểm kỹ thuật.pdf |
| Nhà ảo thuật | DOBOT | 4 | 0.2 | 500 | 320 (nửa trọng tải) | không xác định | 32.0 | Đầu phun in 3D, laser, ống đựng bút, cốc hút chân không, kẹp | $1199.00 | dobot-nhà ảo thuật | đặc tả.html |
| robolink | đúng | 4 – 5 | 1 | 3000 | 200 | 62 | Gripper, nam châm điện, trục phụ, cốc hút, bất cứ thứ gì | <£ 5000 | https://www.igus.co.uk/robolink/robot | https://www.igus.co.uk/robolink/robot?tab=2 |
Phân loại
Cánh tay robot lắp đặt các đoạn gương chính của Kính viễn vọng Không gian James Webb
Một cánh tay rô bốt gắp sản phẩm nối tiếp có thể được mô tả như một chuỗi liên kết được chuyển động bằng các khớp được kích hoạt bởi động cơ. Một bộ hiệu ứng cuối, còn được gọi là tay rô bốt, có thể được gắn vào phần cuối của dây chuyền.

Như các cơ chế rô bốt khác, các cánh tay rô bốt thường được phân loại theo số bậc tự do. Hiểu một cách đơn giản hơn, số bậc tự do bằng số khớp di chuyển trên các liên kết của cánh tay robot gắp sản phẩm. Một cánh tay robot gắp sản phẩm cần có ít nhất sáu bậc tự do để cho phép tay robot đạt được tư thế tùy ý (vị trí và hướng) trong không gian ba chiều.
Ngoài ra, còn có các bậc tự do bổ sung, cho phép thay đổi tư thế của một số liên kết trên cánh tay robot gắp sản phẩm (ví dụ: khuỷu tay lên / xuống), trong khi vẫn giữ tay rô bốt ở cùng một tư thế. Chuyển động học nghịch đảo là quá trình toán học để tính toán cấu hình của một cánh tay, thường là về góc khớp, cho một tư thế mong muốn của tay robot trong không gian ba chiều.
Các Canadarm đạt cho một phi thuyền không gian tiếp tế vào quỹ đạo Trái đất
Bàn tay robot

Bộ hiệu ứng cuối, hoặc bàn tay robot, có thể được thiết kế để thực hiện bất kỳ tác vụ mong muốn nào như hàn, kẹp, kéo sợi, v.v., tùy thuộc vào ứng dụng.
Ví dụ, cánh tay robot trong dây chuyền lắp ráp ô tô thực hiện nhiều nhiệm vụ khác nhau, ví dụ như: hàn hoặc xoay, di chuyển, đặt các bộ phận khác nhau tại từng vị trí trong quá trình lắp ráp. Trong một số trường hợp, bàn tay robot sẽ mô phỏng gần với bàn tay con người, như trong các robot được thiết kế để tiến hành xử lý bom .
Mô hình cánh tay robot gắp sản phẩm dành cho bạn
Bạn cảm thấy thích các mô hình cánh tay robot gắp sản phẩm này? Tuy nhiên, bạn không đủ kinh phí cũng như nguồn lực để đầu tư vào các cánh tay vĩ đại như trên. Thì lúc này, các cánh tay robot mô phỏng chạy trên Arduino sẽ là lựa chọn hoàn hảo cho bạn.
Bạn có thể mua những mô hình cánh tay robot có sẵn, hoặc những mô hình lắp ráp về và tự xây dựng cánh tay robot cho mình. Tuy nhiên, nếu bạn là người mới bắt đầu tìm hiểu lĩnh vực này, bạn nên mua những sản phẩm đã có board mạch và hướng dẫn sử dụng chi tiết để hiểu hơn về nguyên lý hoạt động của chúng.
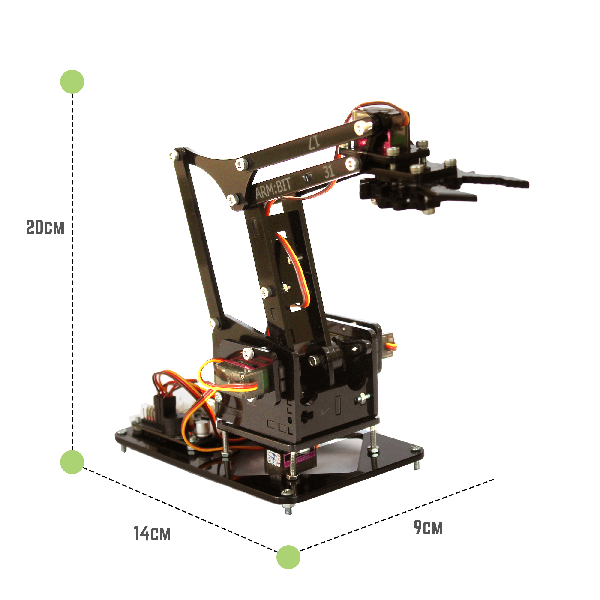
Một trong những lựa chọn mà tôi muốn đề xuất cho bạn chính là cánh tay robot 4 bậc ArmBot. Đây là sản phẩm có bộ mica đã cắt sẵn kèm theo hướng dẫn chi tiết. Bạn chỉ cần làm theo hướng dẫn là đã có thể lập trình điều khiển được cánh tay này rồi. Có thể sẽ phù hợp với bạn lúc này.
Ngoài ra, khi bạn đã biết lập trình cơ bản thì bạn có thể tìm hiểu lập trình nâng cao hơn với các ngôn ngữ như Python hoặc trên Arduino.
Kết luận,
Trên đây là tất cả những thông tin về cánh tay robot gắp sản phẩm mà bạn cần biết. Hy vọng bài viết này hữu ích đối với bạn. Nếu bạn muốn mua các loại robot mô phỏng cánh tay robot gắp sản phẩm hiện đại, vui lòng liên hệ OhStem để được hỗ trợ kỹ hơn:
Fanpage: https://www.facebook.com/ohstem.aitt
Hotline: 08.6666.8168
Youtube: https://www.youtube.com/c/ohstem