Trong dự án xBot này, chúng ta sẽ thử lập trình cho robot xBot di chuyển cơ bản theo các hướng như đi tới, lui, quay trái, quay phải.
Mục lục
Giới thiệu về động cơ
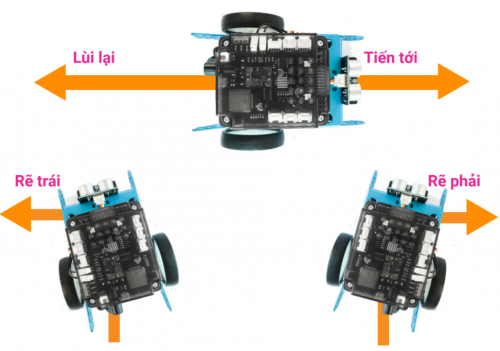
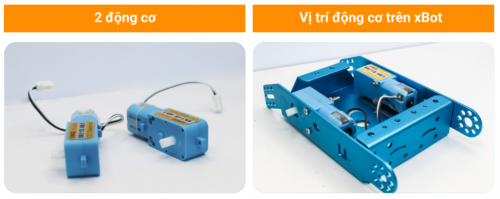
xBot được trang bị 2 động cơ để điều khiển 2 bánh sau và một bánh điều hướng ở đầu xe. Các động cơ này sẽ làm cho bánh xe quay và giúp cho xBot di chuyển tự do nhiều hướng (tiến tới, lùi lại, rẽ trái, rẽ phải) hoặc thực hiện một tác vụ phức tạp nào đó theo yêu cầu.
Giới thiệu về khối lệnh
Các khối lệnh để điều khiển động bao gồm như sau:
Khối lệnh điều khiển cả 2 động cơ để đi tới, lui, quay trái, quay phải một cách liên tục cho đến khi có lệnh dừng lại hoặc chương trình bị dừng.

Khối lệnh điều khiển cả 2 động cơ để đi tới, lui, quay trái, quay phải trong một thời gian cụ thể rồi dừng lại.
Ngoài ra chúng ta cũng có thể cho xBot di chuyển bằng cách điều khiển tốc độ của từng động cơ 2 bên.
![]()
Lưu ý: Tốc độ quay của mỗi động cơ có giá trị từ -100 đến 100. Giá trị tốc độ càng lớn thì động cơ quay càng nhanh.
- Tốc độ > 0: Động cơ quay thuận chiều, xBot đi tới.
- Tốc độ < 0: Động cơ quay ngược chiều, xBot lùi lại.
Lập trình di chuyển cơ bản
Di chuyển tới lui
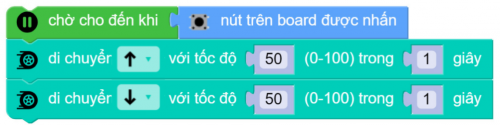
Chương trình sau đây sẽ điều khiển cho xBot di chuyển về phía trước 1 giây và sau đó lùi lại 1 giây (Với điều kiện đặt ra là khi nút trên xBot được nhấn):
Chương trình như sau:
Trong chương trình trên, ta có sử dụng 2 khối lệnh mới:
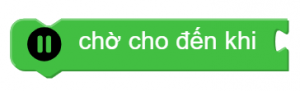
- Danh mục: Vòng lặp.
- Dừng chương trình cho đến khi điều kiện xảy ra (điều kiện bằng True)
![]()
- Danh mục: Đầu vào
- Trả về giá trị True (giá trị đúng) khi bạn nhấn nút trên bo mạch. Trả về False (giá trị sai) khi bạn không nhấn.

Ta dùng khối lệnh này kết hợp với khối lệnh phía trên để ra lệnh xBot thực hiện khối lệnh tiếp theo khi ta nhấn nút.
Di chuyển quay trái quay phải
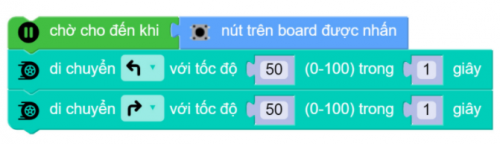
Chương trình sau đây sẽ điều khiển cho xBot quay trái 1 giây và sau đó quay qua phải 1 giây sau khi nút trên xBot được nhấn.
Chương sau đây cũng tương đương nhưng dùng khối lệnh điều khiển tốc độ của từng động cơ. xBot sẽ quay qua phải trong 1 giây rồi quay qua trái 1 giây.
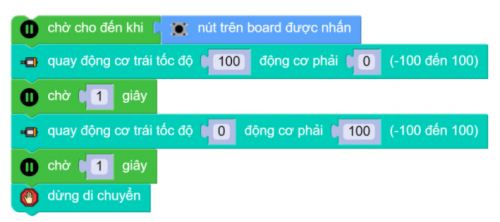
Giải thích: Khi động cơ bên trái quay nhanh (và dẫn đến bánh xe sẽ quay nhanh hơn) hơn động cơ bên phải thì robot sẽ quay qua phải và ngược lại.
Tải chương trình mẫu
Bạn có thể sử dụng trực tiếp chương trình mẫu chúng tôi đã lập trình sẵn cho bạn:
Bạn đã thực hiện thành công dự án trên chưa? Hãy chia sẻ với chúng tôi nhé. Chúng tôi rất hy vọng sẽ nhận được phản hồi từ bạn.
Để tìm hiểu và đặt hàng robot STEM xBot, bạn có thể tham khảo tại đường dẫn sau: đồ chơi STEM xBot
Liên hệ OhStem hoặc để lại bình luận phía dưới nếu bạn có bất kỳ thắc mắc gì nhé:
- Fanpage: https://www.facebook.com/ohstem.aitt
- Hotline: 08.6666.8168
- Youtube: https://www.youtube.com/c/ohstem