Robot đẩy ngã chai nước trong vòng tròn là một bài thi đấu khá phổ biến trong các cuộc thi robot. Các robot sẽ hoạt động bên trong vòng tròn giới hạn bởi vạch đen và có đặt một vài đồ vật dạng hình trụ hoặc những chai nước.
Nhiệm vụ của xBot là tìm và đẩy ngã chai nước mà không ra ngoài vùng bao quanh bởi vạch đen. Trong bài này, chúng tôi sẽ hướng dẫn lập trình robot thực hiện nhiệm vụ trên nhé!
Mục lục
Cách thực hiện
Ở bài toán này, chúng ta sẽ xử lý từng bài toán nhỏ của chương trình để giải quyết vấn đề:
- Dừng trước vạch đen, sau đó lùi lại và rẽ hướng khác
- Phát hiện chai nước và đẩy ngã
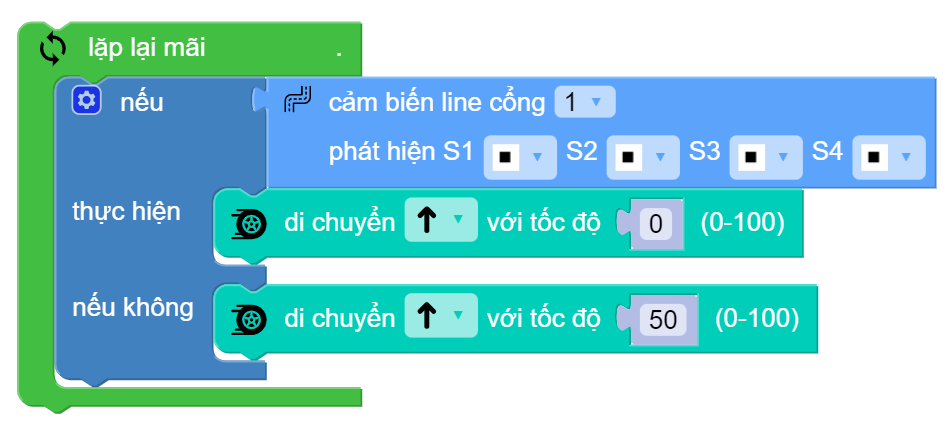
Dừng trước vạch đen
Để tránh đi ra khỏi vòng tròn, robot cần phát hiện ra vạch đen sau đó dừng lại.
Nếu bạn chưa xem cách sử dụng cảm biến dò vạch hoặc đã quên thì hãy xem lại bài Dừng trước vạch đen để hiểu nhé
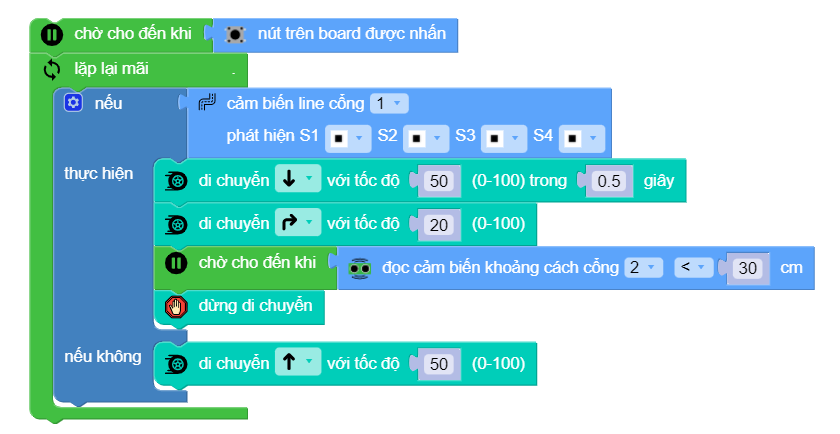
Tìm chai nước và đẩy ngã
Nếu bạn chưa xem cách sử dụng cảm biến siêu âm hoặc đã quên thì hãy xem lại bài Dừng trước vật cản để hiểu nhé.
Chúng ta sẽ cho robot liên tục xoay sang phải ![]() cho đến khi cảm biến khoảng cách phát hiện chai nước (khoảng cách < 30cm):
cho đến khi cảm biến khoảng cách phát hiện chai nước (khoảng cách < 30cm):

Sau đó, robot tiến tới và đẩy ngã chai nước.
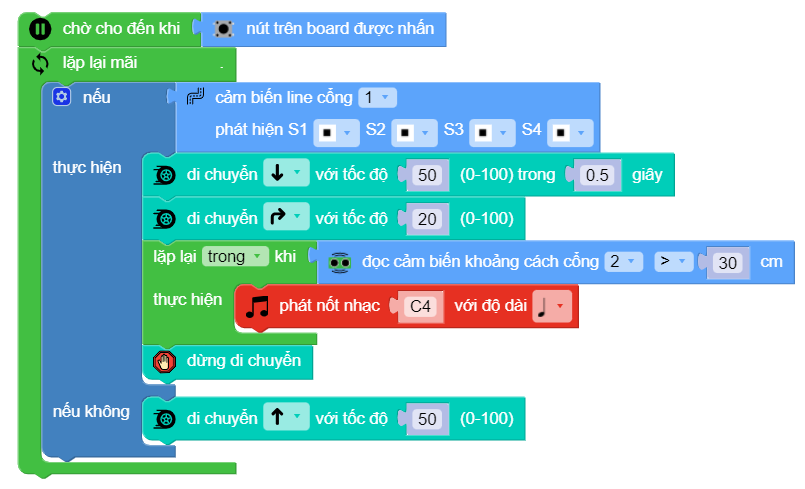
Vừa tìm vừa phát tín hiệu
Để sinh động hơn, thay vì robot chỉ xoay sang phải và tìm kiếm mục tiêu mà không làm gì, hãy thử cho robot vừa xoay vừa phát ra âm thanh. Khi đó khối lệnh chương trình như sau:
Tải chương trình mẫu
Bạn có thể sử dụng trực tiếp chương trình mẫu tại đây.
Bạn đã thực hiện thành công dự án robot đẩy ngã chai nước trên chưa? Hãy chia sẻ với chúng tôi nhé. Chúng tôi rất hy vọng sẽ nhận được phản hồi từ bạn. Liên hệ OhStem hoặc để lại bình luận phía dưới nếu bạn có bất kỳ thắc mắc gì nhé:
- Fanpage: https://www.facebook.com/ohstem.aitt
- Hotline: 08.6666.8168
- Youtube: https://www.youtube.com/c/ohstem