Trong bài viết này, chúng ta sẽ lập trình robot dò đường dựa trên cảm biến 4 mắt hồng ngoại của robot xBot. Hãy cùng xem hướng dẫn lập trình robot dò đường bên dưới nhé!
Lưu ý: chúng ta sẽ sử dụng bản đồ đi kèm sản phẩm xBot
Mục lục
Lập trình

Lưu ý: Để robot chạy ổn định và không bị chệch khỏi đường vạch, bạn nên giảm tốc độ di chuyển và thử nghiệm cho đến khi đạt được kết quả tốt nhất.
Giải thích chương trình
Chúng ta sẽ thêm phần khối lệnh chờ nút nhấn được nhấn để bắt đầu chương trình.:
![]()
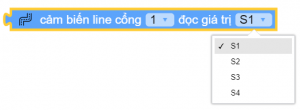
Ở bài học này ta sẽ sử dụng khối chức năng chính là đọc trạng thái của 2 trong 4 mắt đọc của cảm biến dò line (2 mắt ngoài cùng là S1 và S4).
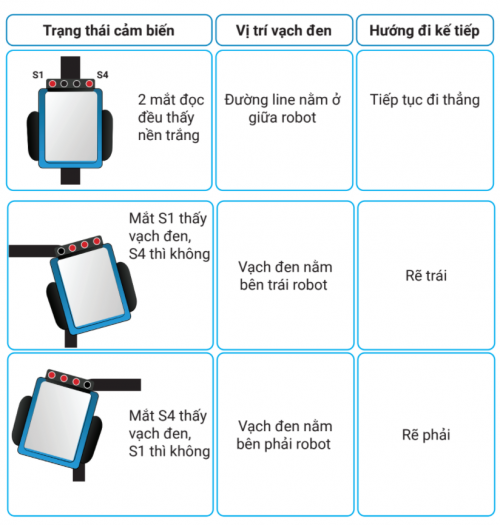
Dựa vào yêu cầu, xBot sẽ hoạt động theo bảng phân tích sau:
Từ đó ta có khối lệnh tương ứng:
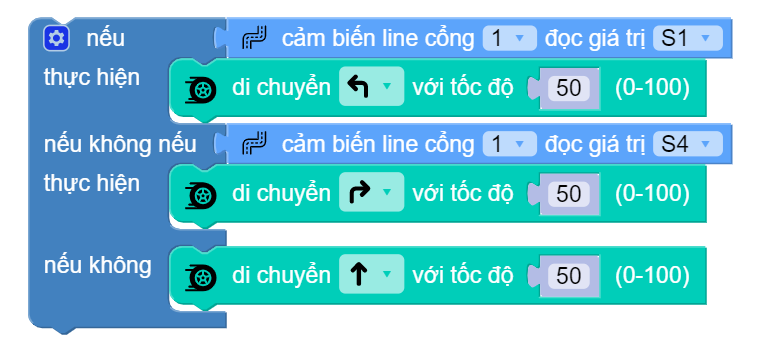
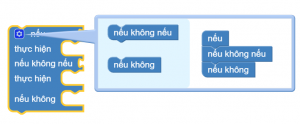
Khối lệnh điều kiện như trên được tạo thêm bằng cách nhấn vào biểu tượng Cài đặt màu xanh dương đậm ngay góc trái trên.
Tải chương trình mẫu
Bạn có thể sử dụng trực tiếp chương trình mẫu chúng tôi đã lập trình sẵn cho bạn tại đây.
Bạn đã thực hiện thành công dự án trên chưa? Hãy chia sẻ với chúng tôi nhé. Chúng tôi rất hy vọng sẽ nhận được phản hồi từ bạn.
Để tìm hiểu và đặt hàng robot STEM xBot, bạn có thể tham khảo tại đường dẫn sau: đồ chơi STEM xBot
Liên hệ OhStem hoặc để lại bình luận phía dưới nếu bạn có bất kỳ thắc mắc gì nhé:
- Fanpage: https://www.facebook.com/ohstem.aitt
- Hotline: 08.6666.8168
- Youtube: https://www.youtube.com/c/ohstem