Trong dự án xBot này, chúng ta sẽ cho robot di chuyển về phía trước và dừng trước vật cản nếu phát hiện vật cản ở khoảng cách nhỏ hơn 25cm.

Mục lục
Lập trình robot dừng trước vật cản
Giải thích chương trình
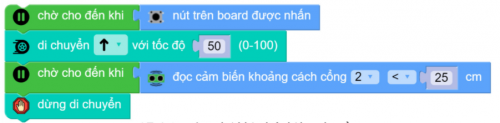
Chúng ta sẽ thêm phần khối lệnh chờ nút nhấn được nhấn để bắt đầu chương trình.:
![]()
Ta sẽ yêu cầu robot tiến tới. Bạn có thể tùy chỉnh tốc độ tùy ý bằng cách điền số từ 0~100 tương ứng từ chậm đến nhanh:
![]()
Ta sử dụng khối lệnh đọc cảm biến khoảng cách và so sánh với điều kiện cho trước (ở đây là khoảng cách từ mắt đọc đến vật cản nhỏ hơn 25 cm). Khi sử dụng khổi lệnh này, robot sẽ thực hiện dòng lệnh tiếp theo chỉ khi robot chạm vật cản ở khoảng cách nhỏ hơn 25 cm:

Cuối cùng, khi phát hiện vật cản, robot sẽ dừng ngay lập tức bằng khối lệnh dừng di chuyển ![]() . Để tiếp tục di chuyển, ta sẽ nhấn lại nút nhấn trên robot.
. Để tiếp tục di chuyển, ta sẽ nhấn lại nút nhấn trên robot.
Tải chương trình mẫu
Bạn có thể sử dụng trực tiếp chương trình mẫu chúng tôi đã lập trình sẵn cho bạn tại đây.
Bạn đã thực hiện thành công dự án trên chưa? Hãy chia sẻ với chúng tôi nhé. Chúng tôi rất hy vọng sẽ nhận được phản hồi từ bạn. Liên hệ OhStem hoặc để lại bình luận phía dưới nếu bạn có bất kỳ thắc mắc gì nhé:
- Fanpage: https://www.facebook.com/ohstem.aitt
- Hotline: 08.6666.8168
- Youtube: https://www.youtube.com/c/ohstem