Trong bài này, chúng ta sẽ cùng lập trình cho robot lập trình xBot với chủ đề: Đọc cảm biến gia tốc.
Mục lục
Giới thiệu về cảm biến gia tốc
Mạch điều khiển trên xBot được tích hợp sẵn 1 chip MPU6050. Chip này bao gồm 2 loại cảm biến chuyển động là cảm biến gia tốc (accelerometer) và cảm biến gyroscope.
Cảm biến gia tốc giúp đo được góc nghiêng của xBot và cho ta biết xBot đang nghiêng về hướng nào (nghiêng tới trước, sau, nghiêng sang trái phải hay nghiêng theo trục đứng) và có đang di chuyển hay không.
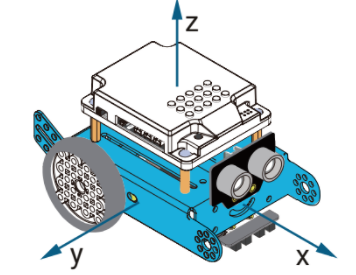
Cảm biến này đo được độ nghiêng theo 3 trục tọa độ không gian:
- Trục x: nghiêng về sau hay tới phía trước
- Trục y: nghiêng qua trái hoặc phải
- Trục z: xBot nằm úp hoặc ngửa
Khối lệnh đọc cảm biến gia tốc
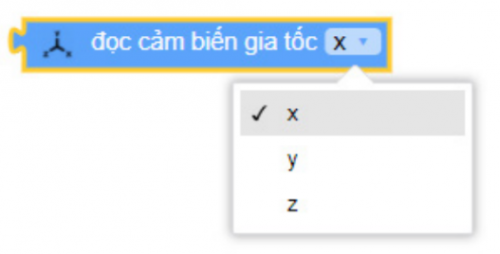
Khối lệnh đọc giá trị các trục x, y, z của cảm biến gia tốc. Các giá trị này sẽ cho ta biết xBot đang nghiêng về hướng nào.
Giới thiệu về cửa sổ thông tin
Cửa sổ thông tin là thành phần giúp chúng ta biết được các thông tin gửi đến từ robot, giúp cho việc viết chương trình dễ dàng hơn.
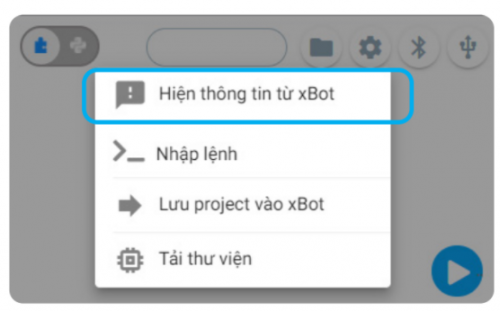
Để hiển thị cửa sổ thông tin, bạn hãy nhấn vào nút Chức năng nâng cao (hình bánh xe răng cưa), chọn Hiện thông tin từ xBot.
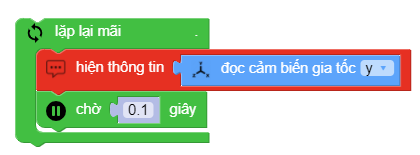
Để gửi thông tin cho robot và hiển thị lên cửa sổ thông tin này, bạn cần dùng khối lệnh sau:

Khối lệnh này sẽ ra lệnh xBot gửi một giá trị nào đó (chữ, số hay bất kỳ thông tin gì chúng ta quan tâm) đến cửa sổ thông tin trên giao diện lập trình.
Lập trình đọc cảm biến gia tốc
Bạn hãy thử viết chương trình in ra độ nghiêng của trục y của robot. Trục này cho biết độ nghiêng qua bên trái hoặc bên phải của robot.
Sau khi chạy chương trình, bạn hãy thử cầm robot xBot và nghiêng qua 2 bên trái phải để xem giá trị các trục thay đổi như thế nào.
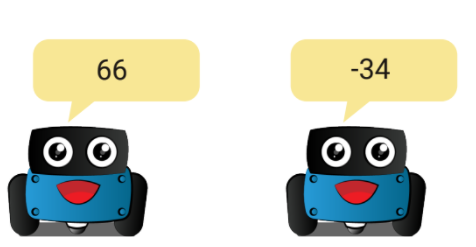
Giá trị in ra sẽ từ -100 đến 100. Khi robot bị nghiêng qua trái, giá trị in ra sẽ <0 và ngược lại >0 khi nghiêng qua phải. Bạn có thể thử in ra giá trị các trục còn lại là x và z.
Tải chương trình mẫu
Bạn có thể sử dụng trực tiếp chương trình mẫu chúng tôi đã lập trình sẵn cho bạn tại đây.
Bạn đã thực hiện thành công dự án trên chưa? Hãy chia sẻ với chúng tôi nhé. Chúng tôi rất hy vọng sẽ nhận được phản hồi từ bạn.
Để tìm hiểu và đặt hàng robot STEM xBot, bạn có thể tham khảo tại đường dẫn sau: đồ chơi STEM xBot
Liên hệ OhStem hoặc để lại bình luận phía dưới nếu bạn có bất kỳ thắc mắc gì nhé:
- Fanpage: https://www.facebook.com/ohstem.aitt
- Hotline: 08.6666.8168
- Youtube: https://www.youtube.com/c/ohstem