Trong bài này, OhStem sẽ hướng dẫn bạn cách chế tạo robot arduino một cách nhanh chóng và dễ dàng. Robot là một trong những thú vui điện tử hợp ví tiền với nhiều tầng lớp trong những năm gần đây. Những con robot mắc tiền và phải cần trình độ cao mới làm được cách đây vài thập kỷ, bây giờ đã trở nên dễ dàng thực hiện và chi phí rẻ hơn bao giờ hết! Quan trọng nhất, chúng mang lại niềm vui cho người thực hiện.
Hãy nhớ rằng bài này chỉ hướng dẫn bạn tạo ra rô-bốt, bạn sẽ không bị giới hạn bởi ngân sách và trí tưởng tượng của mình. Nếu bạn muốn mua thêm cảm biến hoặc một khung máy đẹp hơn, hãy mua nó! Toàn bộ quá trình có thể mất một hoặc hai giờ, vì vậy hãy sẵn sàng để vui chơi!
>> Xem thêm: [PDF] Lập trình Arduino là gì? Tài liệu học Arduino miễn phí 2021
Mục lục
Chế tạo khung xe robot arduino



- Đặt bộ pin úp xuống và đặt sao cho cáp của nó hướng về phía bạn.
- Lấy hai miếng băng dính hai mặt và dán chúng trên các cạnh dài của mỗi servo. Đảm bảo căn chỉnh servo sao cho góc ban đầu ở phía dưới.
- Bóc lớp sau của băng keo và ấn mạnh các servo vào bộ pin.
Lưu ý: Đảm bảo áp dụng các Servos hướng sao cho các trục hướng về phía cuối của bộ pin. Đồng thời, hãy đảm bảo rằng các servo được ép chặt vào nhau và chúng nằm chính giữa bộ pin.
Cách đơn giản nhất để làm điều này là bóc mặt sau của băng keo, giữ một servo trong một tay (ấn mặt sau của chúng vào nhau), sau đó ấn chúng xuống cùng một lúc vào bộ pin.
Breadboard & Arduino
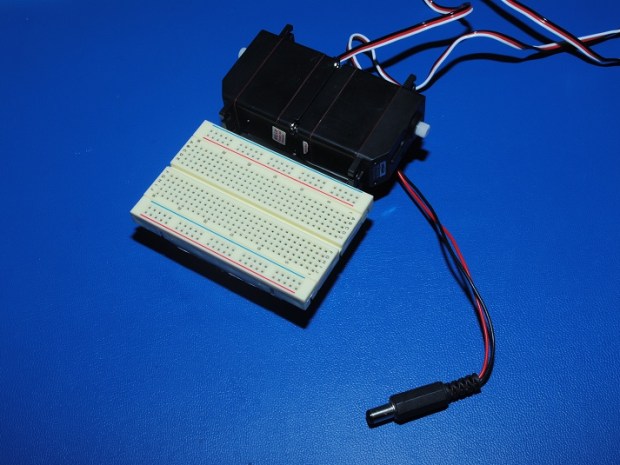


- Gắn bảng mạch vào đầu của bộ pin. Bạn có thể dán mặt sau của băng dính xốp đã có trên breadboard, hoặc bạn có thể sử dụng băng dính hai mặt của riêng mình – Tôi khuyên bạn nên sử dụng loại sau.
- Arduino nằm trên đầu các servo trong thiết kế robot này. Cắt một đoạn băng nhỏ hơn một chút so với chiều rộng của Arduino và đặt băng trên servo.
- Bóc lớp dán ra khỏi băng dính hai mặt và nhấn Arduino lên băng.
Lưu ý: Tránh để Arduino nhô ra quá nhiều phía trên breadboard.
Bánh xe robot arduino
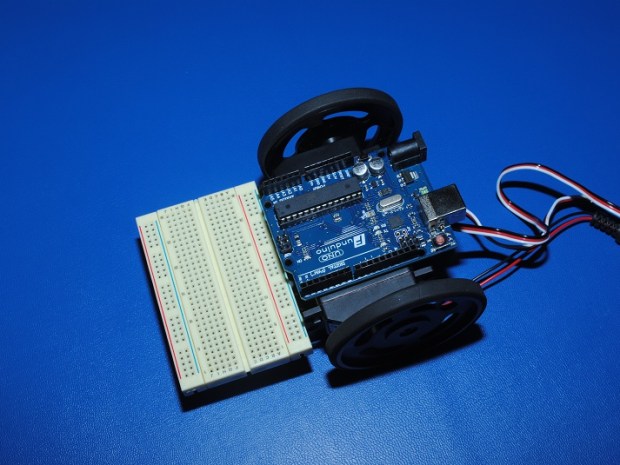
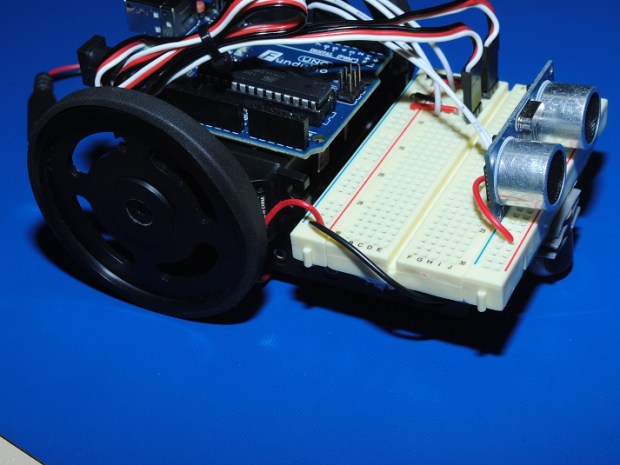
Lấy bánh xe và ấn chặt chúng vào servo. Các bánh xe cần phải vặn rất chặt, vì vậy cần rất nhiều lực để đưa chúng vào!
Bước cuối cùng của quá trình lắp ráp là đặt một bánh xe ở mặt trước của robot. Như bạn có thể thấy trong hình, bánh xe là quá ngắn khoảng 1/4 “, vì vậy chúng ta cần tìm một thứ gì đó để đặt giữa nó và breadboard.

Sử dụng gỗ vụn và băng dính, dựng một miếng đệm để tăng độ hở của bánh xe. Khi miếng đệm có kích thước chính xác, hãy sử dụng băng dính hai mặt và cố định bảng mạch vào miếng đệm và miếng đệm vào khay bánh.
Nối dây servo
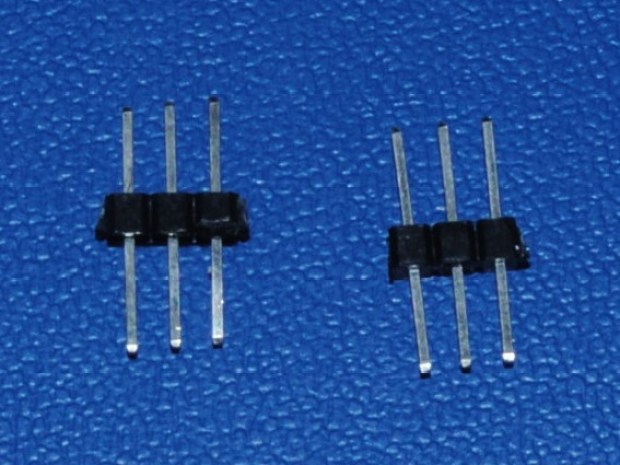

Sử dụng 2 đoạn 3 chân như hình.
Miếng nhựa đen của chân cắm có thể đã bị lệch khỏi tâm. Dùng kìm, cẩn thận đặt lại vị trí miếng nhựa đen sao cho nó nằm ở điểm giữa của chốt kim loại.
Nhấn các chân cắm vào breadboard, sau đó gắn cáp servo vào chân cắm, với dây màu đen trên cáp ở phía bên trái.
Kết nối các dây màu đỏ trên servo với thanh dương (đỏ) của breadboard, dây đen với thanh GND (xanh lam) và dây trắng với chân 12 và 13 trên Arduino.
Lưu ý: Giữ bố cục mạch của bạn gọn gàng bằng cách sử dụng nguồn và đường ray nối đất của bảng mạch gần nhất với Arduino (xem hình 3).
Kết nối robot arduino với cảm biến
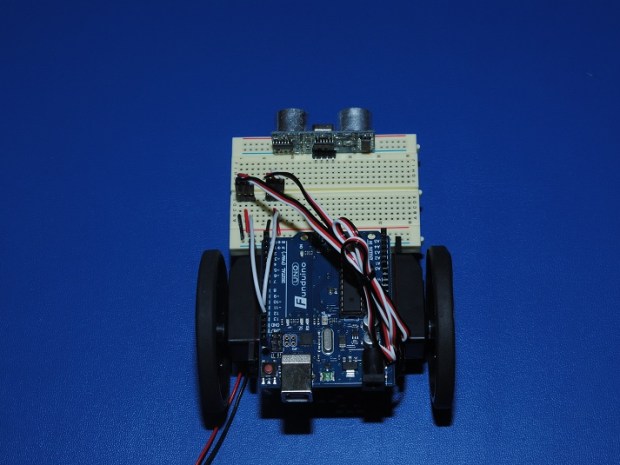
Chèn cảm biến siêu âm sao cho nó hướng về phía trước của rô bốt như hình.
Lưu ý: Cảm biến không được cắm vào nguồn điện hoặc đường ray nối đất, nó nằm trong phần thân của bảng mạch.
Ngoài ra, dây buộc zip giúp giữ cho hệ thống cáp của robot của bạn gọn gàng hơn.
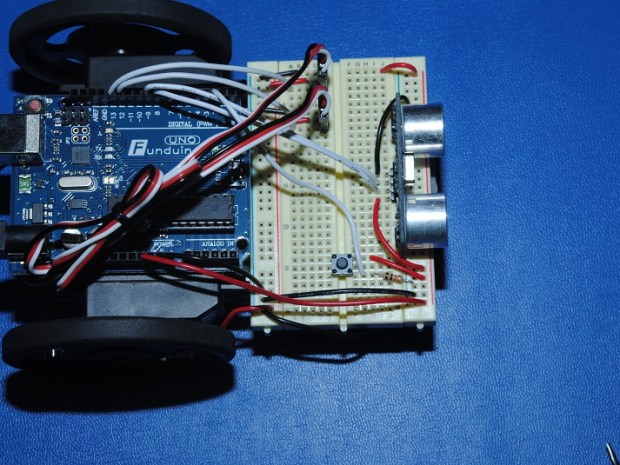
Kết nối cảm biến siêu âm để chân VCC của nó được nối với thanh nguồn phía trước (màu đỏ) trên bảng mạch (không phải ở mặt sau!).
- Kết nối dây màu đen với chân GND của cảm biến và với thanh nguồn GND (màu xanh lam).
- Cuối cùng, kết nối một dây màu trắng với Trig và Echo vào các chân 8 và 9 tương ứng trên Arduino.
Kết nối nguồn

Servos không nên cấp nguồn qua chân 5V trên Arduino vì chúng có thể tạo ra nhiều dòng điện hơn mà Arduino có thể cung cấp. Cách chính xác để cấp nguồn cho Servos là cấp trực tiếp từ một bộ pin (hoặc cùng một bộ pin cấp nguồn cho Arduino hoặc tốt hơn là một bộ pin riêng).
Bốn pin AA sẽ cung cấp cho các động cơ ở khoảng từ 4,8V đến 6V tùy thuộc vào loại pin, loại pin mà các servo của chúng tôi cần. Cách dễ nhất mà tôi đã tìm thấy để làm điều này là: gắn một sợi dây màu đỏ vào lò xo thứ hai từ bên trái, một sợi dây màu đen vào lò xo cuối cùng ở bên phải trong bộ pin.
Lưu ý: Hãy chú ý đến hướng của bộ pin trong hình trên. Đảm bảo rằng khi bạn đặt dây màu đỏ vào “lò xo thứ hai từ bên trái” thì cáp bộ pin nằm ở phía dưới bên trái.
Chạy các dây màu đỏ và đen mà chúng tôi vừa đặt trong các lò xo của bộ pin tới các thanh nguồn ở phía sau của breadboard (cái mà các Servos được cắm vào).
Sử dụng dây màu đen để kết nối chân GND trên Arduino với thanh GND ở phía sau bảng mạch, sau đó sử dụng một dây khác để kết nối hai thanh GND trên bảng mạch với nhau (không kết nối các thanh ray dương với nhau!).
Bây giờ, lấy một sợi dây màu đỏ và kết nối chân 5V trên Arduino với thanh nguồn FRONT (màu đỏ) trên breadboard (không phải thanh nguồn phía sau!).
Thêm công tắc
Cuối cùng, thêm một công tắc vào robot để bạn có thể dừng nó mà không cần phải rút nguồn điện.
Lấy một công tắc nút nhấn và đặt nó trong khoảng trống trong breadboard. Sau đó, sử dụng dây màu đỏ để kết nối một bên của công tắc với thanh ray phía trước, một điện trở 10kΩ để kết nối mặt kia của công tắc với GND, và một dây màu trắng để kết nối bên của công tắc với điện trở vào chân 2 Arduino.
Lập trình cho robot arduino
Bây giờ, đã tới bước quan trọng nhất. Hãy lập trình cho robot của bạn! Bạn có thể tham khảo một nguồn tại đây